��H�[�@�g�h�q�n�|�f�̃w�b�_�[
��H�[�@�g�h�q�n-�f
���@�g���Z��Q�e�@Wi-Fi�E�����R���J�������삻�̂P�@��
�@
�@
�@�O����g���Z��P�e�Ƃ����uApple Pi�v�삵�@�\�e�X�g���s���܂������A������g���Z��Q�e�Ƃ��܂��āA�ʐ^�P�̂悤���g���Z�Q�O�P�U�N�P�P��������Ղ��������M����܂����u�X�}�z�ŏc�����l�IIoT���{�b�g�E���[�r�̐���v�����Ƀ����R���J�����삵�܂��B�@
�@��������Ղ��M�ł��B�@���e��Web�v���E�U���g��Wi-Fi�o�R�ŁA���Y�p�C��PIC���R���{�����������R���J�����𑀍삷����̂ŁA�g���Z�p�͐��肾������ł��B�@
�@�����͌�Ղ���̃J������t�������Y�p�C���Ɠ��������@�ł͂Ȃ��A��菬�^�̃T�[�{�ŃV���v���ɃJ�����݂̂������@�Ŏ��삵�����Ǝv���܂��B����A�n��ɍ~�肽�h���[���̃J�����������[�g���삷��̂Ɏ��Ă��܂��B
�@�g���Z�͂��łɍw�����Ă��܂������A�����͓��e�������ɂƂ��Ă̓`���b�g�n�[�h���������������̂ŁA��ɂȂ��Ă��܂������A�h���[���̃I�[�g�p�C���b�g����|�������A�ŁA���g�߂�悤�ɂȂ�܂����B�@
�@�T�[�{���[�^�[���䃂�W���[���̕t�^��͎����Ă��܂��̂ŁA�p�[�c�����w�����܂����B�i�ʐ^�Q�j
�@������q�����������������@P������݂ł����AWi-Fi��ŃT�[�{���R���g���[���ł��郊���R���J�����ŁA���䃂�W���[���ɂ�PIC���g���Ă��邽��MPLAB���C���X�g�[������K�v������A������MPLAB X�ƂȂ��Ă���悤�ł��B�@PIC�͂P�O�N�ʑO�ɂ���������͂���܂����A���S�ɋL���̊O�ł��̂ŁA���S�҂Ɠ����ł��B
�@����͎��̎菇�Ŏ��{���܂��B
�@�@�@�@�����[�g�J�����{�̂̐���
�@�@�A�@�q�����������������@P���T�C�h�A�v���P�[�V�����̍\�z
�@�@�B�@���䃂�W���[���ƃt�@�[���E�G�A�쐻
�@
�@�悸�́A�����[�g�J�����ł����A����͑S�̂̃V�X�e���̋@�\�̃e�X�g���ړI�ł��̂ŁA�h���[���ł̌o�������ċɗ̓V���v���ɂ��邱�Ƃ��l���܂����B�@�J�����}�E���g�́A�A�}�]���ōw���������ؐ���SG90�~�j�T�[�{�p�J�����}�E���g���g�p���A�������A�}�]������w�����܂����q�����������������@P�����ی�P�[�X�V�F���J�o�[�i�ʐ^�R�j�̏�ɏ������悤�Ɏ�t�܂��̂ŁA�ŏI�I�ɂ��ʐ^�S�̂悤�ɂ��Ȃ�R���p�N�g�ɂȂ�܂��B
�@��̓I�ȍ쐻�菇�́A�悸���ʐ^�T���J�����}�E���g�֘A�̃p�[�c����g���Ă܂������A�����������������Ă��Ȃ��̂ŁA���߂Ă̕��͑g���Ă�̂ɂ�����ƌ˘f����������܂���B�@
�@�܂��A�ʐ^�U�̂悤���t���̃z�[���������Ă��܂������A�ʐ^�ł͕�����Â炢�̂ł����A�����a�R���w�^���Ă��ăT�[�{�����肷�邽�ߎg�����ɂȂ炸�A�莝���̃w���p�̃p�[�c���g�p���܂����B�@�w�^���̌����́A���`�p�̋��^���}�g���f�Ȃ����߂Ǝv���܂��B�@�i���ؐ��̃m�[�u�����h�i�ł͗ǂ����邱�Ƃł��̂ŁA�e�X�g�I�Ȃ��̂ɂ͏��m�̏�Ŏg���Ă܂��B�j
�@�J�������W���[�����J�����}�E���g�֎�t����p�[�c�͕t������Ă��Ȃ��̂ŁA�ǂ����邩�l�������ʁA�ʂɃA�}�]�������J�����z���_�[�����Y�}�E���g�X�^���h�Ȃ���̂��w�����A�ʐ^�V�A�W�̂悤�ɉ��H���āA�ʐ^�X�A�P�O�̂悤�ɑg���āA�J�����}�E���g�Ɏ�t�܂����B
�@���̒i�K���A���삵�܂��������R���J�����{�̂̂q�����������������@P���ɓ���X�g���[�~���O�̃A�v�����C���X�g�[�����APC��Web�v���E�U�Ŋm�F�����ƂƁAWeb�y�[�W����T�[�{���[�^�[�𑀍삷�邽�߂̏�����Ƃ����܂��B
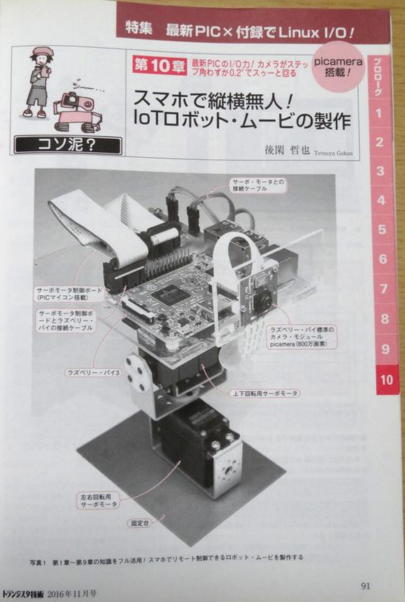
�ʐ^�P�@�g���Z�̋L���̈ꕔ

�ʐ^�Q�@�T�[�{���[�^�[���䃂�W���[���p�[�c�ꎮ

�ʐ^�R�@�ی�P�[�X�V�F���J�o�[�i���j
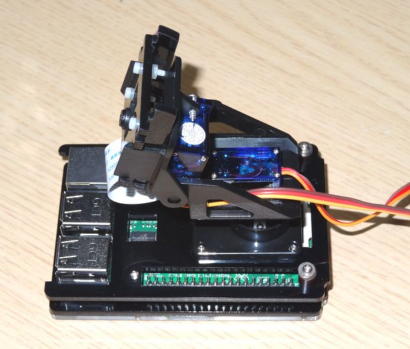
�ʐ^�S�@�����R���J�����{�̂̉��g��
���@�s�q�d�w�S�T�O�@�r�o�n�q�s�@��
�@�r�c�w�ɑ����ė��B
�@�ȉ������B

�A���J���g�@�m���P�X
| �g���Z��Q�e�@Wi-Fi�E�����R���J�������삻�̂P |
|---|
�Q�O�P�V�N�W���X�� |
 �ʐ^�T�@�J�����}�E���g�֘A�̃p�[�c 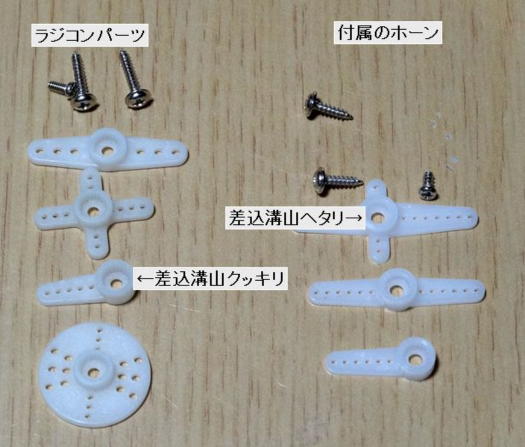 �ʐ^�U�@�z�[���֘A�̃p�[�c 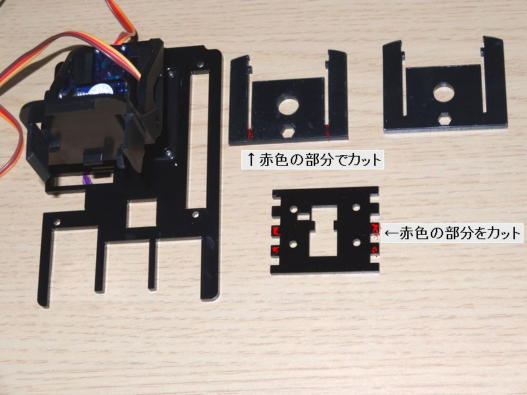 �ʐ^�V�@�J�����z���_�[�����Y�}�E���g�X�^���h�̃p�[�c�i�E�j  �ʐ^�W�@�J�������W���[���̌Œ�i���j 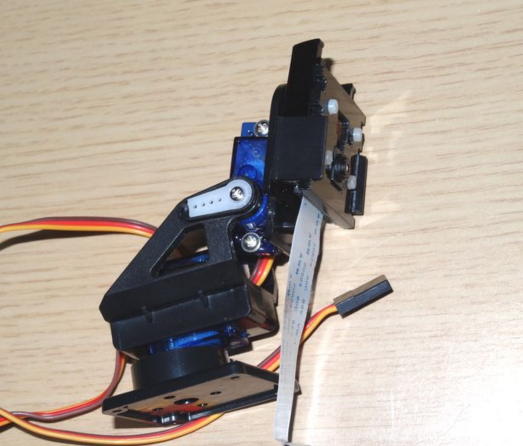 �ʐ^�X�@�J�������W���[���̃J�����}�E���g�ւ̎�t 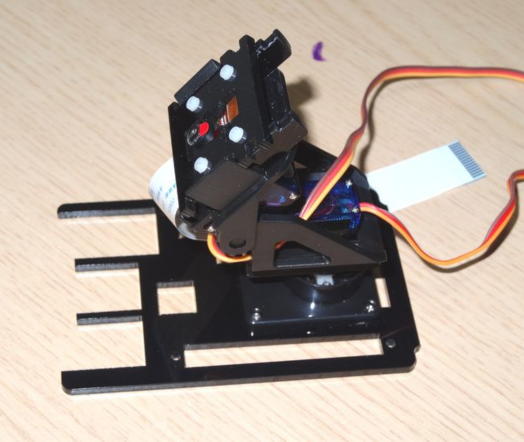 �ʐ^�P�O�@�ی�P�[�X�V�F���J�o�[�ւ̎�t |