趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< トラ技第2弾 Wi-Fi・リモコンカメラ製作その2 >
今回は、サーボモータ制御ボード(写真1)を組立て、前回製作したカメラマウントと同様に写真2のようにラズパイに取付ました。 思っていたより何かあっけない感じですが、これでハード関係の製作は終了です。
引き続いて、トラ技2016年11月号 P94からの記載に基づいてラズパイサイドのファームウエアを構築します。
ラズパイカメラの扱いは、同誌のP68のAppendix「Raspbian標準のアプリで3分製作」が参考になります。
先ずは動画ストリーミング処理に必要とされる補助アプリ「libjpeg9-dev」のダウロードから始める必要があるとのことで、次のコマンドラインをターミナルモードで打込みます。
sudo apt-get insutall libjpeg9-dev cmake
次いで、動画ストリーミングアプリ(mipg-streamer)をダウンロードする。
sudo git cione https://github.com/jacksonliam/mjpg-streamer.git mjpg-streamer
続いて、picamera専用アプリアプリ(mijp-streamer-experimental)をダウンロードします。
cd mjpg-streamer/mjpg-streamer-experimental
最後にmakeコマンドでコンパイルします。
sudo make
コンパイル後のファイルがあるディレクトリを丸ごと/optへ移動して終了となるとのことで、その通り実行しました。 先ずはホームディレクトリに戻り、
cd
丸ごと移動。
sudo mv mjpg-streamer/mjpg-streamer-experimental /opt/mjpg-streamer
動画ストリーミングアプリの起動ですが、ドローンの組立ての経験から割と馴染みのあるコマンドラインです。
sudo LD_LIBRARY_PATH=/opt/mjpg-streamer/ /opt/mjpg-streamer/mjpg_streamer -i ”input_raspicam.so-fps 20 -q 50 -x 640 -y 480" -o "output_http.so -p 8010 -w /opt/mjpg-streamer/www"
記載に従いPCのExplorerではなくChromeにてラズパイのポートを指定。 当方の場合は次の通りです。
http://192.168.1.17:8010
写真3のよう「MJPG-Streamer」のスタート画面が表示されました。 メニューの「Static」では写真4のような静止画が表示され、「Stream」では写真5(動画でなく済みません。)のように動画が無事表示されました。
このストリーミングアプリをラズパイ起動時に自動立上げするには、自動立上げ用のシェルスクリプトを作成しますが、このシェルスクリプトを含め、次のステップに入ると必要になるファイルが、トラ技直サイトからTR1611P.zip名で「Downloads」ディレクトリにダウンロードできます。 写真6のように普通にダウンロ゙ードサイドからも同じように入手できます。
ダウンロードしたTR1611P.zipファイルは、写真7のようにGUIベースのファイルマネージャで確認し、「ここにファイルを展開」として解凍すると 写真8のように2016年11月号の各章の関係ファイル一式が作成されますが、ファイルネームが文字化けしていましたので分かりやすい名前(ファイル名には日本語を使用しない。)に修正しました。
この展開されたファイルのうち必要なファイルは10章のファイルで、写真9のように4ファイルありますので、自動起動のシェル・スクリプトのファイル「starat_stream.sh」を写真10のように、すでに作成されている「home/pi/work」ディレクトリにファイルマネージャーでコピペして保存します。
最後に、ラズパイの電源をONすれば「MJPG-Streamer」が自動起動するように次のコマンドを入力して、nanoエディタに起動制御ファイル(etc/rc.local)を読み込み、追記作業を行います。
sudo nano /etc/rc.local
読み込んだ起動制御ファイルの最終行の直前に、写真11のように「MJPG-Streamer」の自動起動用のシェル・スクリプト(start_stream.sh)を追記します。 追記作業が終われば、 {Ctrl}+{O]、[Enter]で上書きし、{Ctrl}+{X]、[Enter]でnanoエディタを終了後にリブートして「MJPG-Streamer」が自動起動することを確認します。
sudo reboot
ここまでは上手く行きましたが、次は最終段階のPICへの書込みです。 当方としてはMPLAB Xのインストールから始めて、使い方から学ぶ必要があり、MCCについては全くチンプンカンプンですので、苦労しそうです。
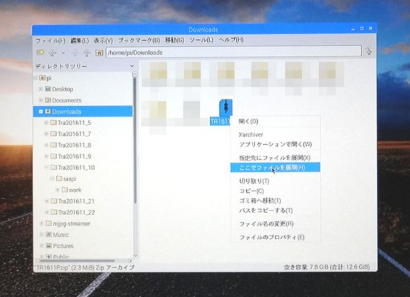
写真7 TR1611P.zipファイルのダウンロード完了画面
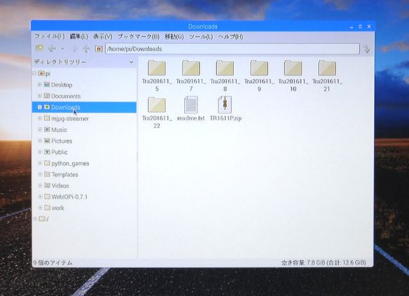
写真8 TR1611P.zipを展開
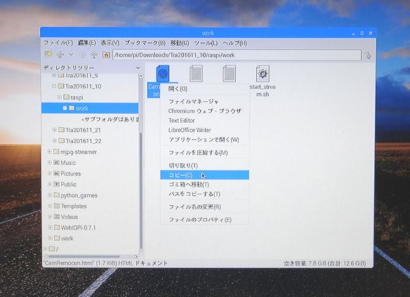
写真9 第10章関連のファイル一式
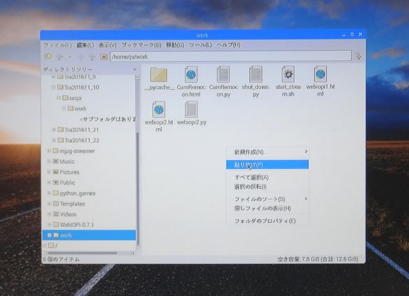
写真10 「home/pi/work」ディレクトリに保存
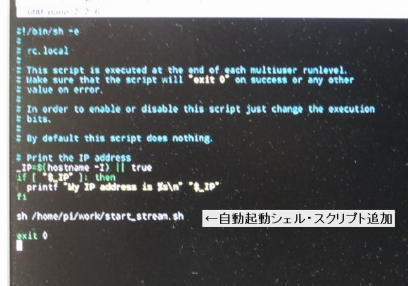
写真11 シェル・スクリプト(start_stream.sh)を追記
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

アラカルト No20
| トラ技第2弾 Wi-Fi・リモコンカメラ製作その2 |
|---|
2017年8月20日 |
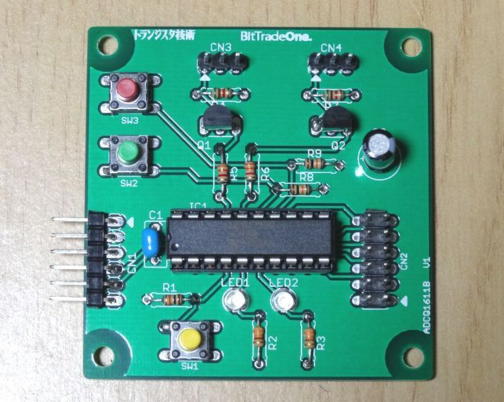 写真1 サーボモータ制御ボード 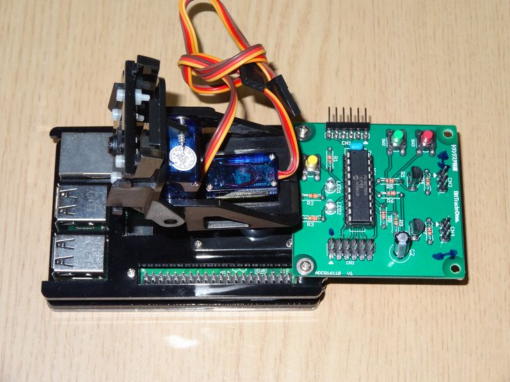 写真2 サーボモータ制御ボードを取付 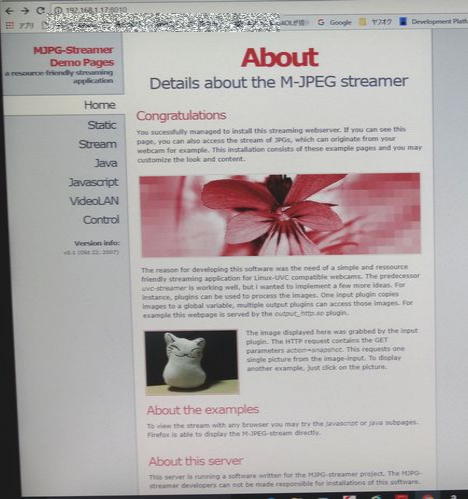 写真3 「MJPG-Streamer」のスタート画面  写真4 写真8 「Static」の画面  写真5 「Stream」の画面 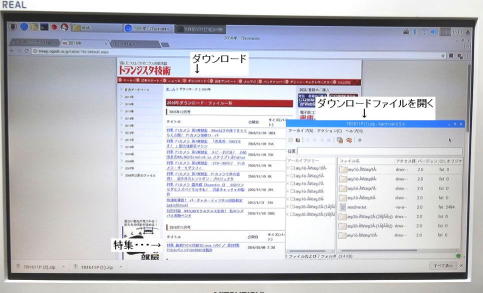 写真6 トラ技のダウンロードサイドからの入手画面 |