趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< WiFi・カメラ付きリモコンカー製作 その2 >
試作タンクの大体のイメージを浮かべながら製作しましたが、細かいところでいろいろ調整に手間取りました。 ラズパイに接続するカメラ(写真1)は、以前報告しました「トラ技第2弾 Wi-Fi・リモコンカメラ製作」で使用したものを、市販品の金具を加工してRaspberry Pi用プレートに固定しました。 取付位置は、USBコネクタを使うため、写真2のように左側にずらして取付けました。
安定化電源基板は写真3のように組み立て、バッテリにつなぐためのUSBコネクタと、DCモーター制御ボードへ3V電源を供給するためのコネクタを接続しました。 出力電圧3Vは、基板上の電圧調整用VRで設定します。 この基板を取り付ける位置に迷いましたが、写真4のように、バッテリ搭載用プレートの下側になる位置へ取付けることにしました。 モーター用の電源は、単3アルカリ電池2本を直列に接続したものでも使えます。
「ダブルギヤーボックス」のギア比は、取りあえず回転トルクが一番弱いAタイプで組み立てました。 付属のモータは、モータ軸に挿入する樹脂製の歯車がすぐ緩んで使えなくなるので、ミニ4駆用のものに交換したほうが良いらしいのですが、試作ですのでこのまま使うことにしました。 各モーターには写真5のようにノイズ対策用に0.001μFのタンタルコンデンサを付け、電源供給用のコネクタも事前にハンダ付けしておきます。
「ダブルギヤーボックス」は、タンクの車体に写真6のようにを取り付けました。写真7がタンク全体を組上げた側面の状態です。 2枚のプレートには配線を楽にするために、コネクタが容易に通る大きさの穴をあけています。 因みに、使用した3本のケーブル付きコネクタは、DCモーター制御ボードを購入した時の付属品です。
写真8が正面で、上部から撮ったのが写真9ですが、安定化電源基板のUSBケーブルがちょっと収まりが悪く気になる他は、全体的にそこそこ上手く収まったと思いますので、試作品と言うことで、このままで進めます。
これで一応、車体の試作品が完成しましたので、次は制御用ソフトを組み込んで、走行テストをしてみたいと思います。

写真1 固定用金具付きカメラ関連一式
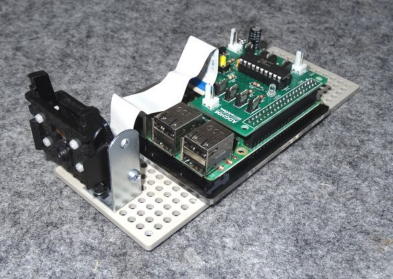
写真2 カメラの固定状態
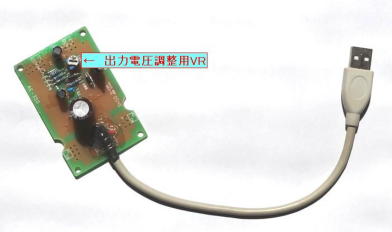
写真3 安定化電源基板
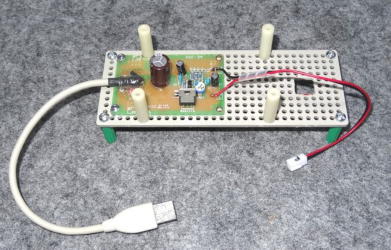
写真4 安定化電源基板取付け状態

写真5 ノイズ対策用タンタルコンデンサ取付け状態
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

アラカルト No27
| WiFi・カメラ付きリモコンカー製作 その2 |
|---|
2018年4月18日 |
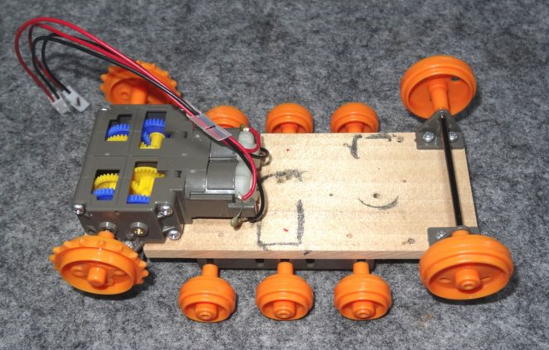 写真6 ダブルギヤーボックス取付け状態 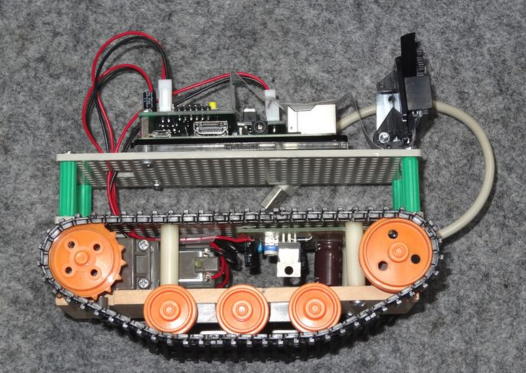 写真7 タンク車体の側面 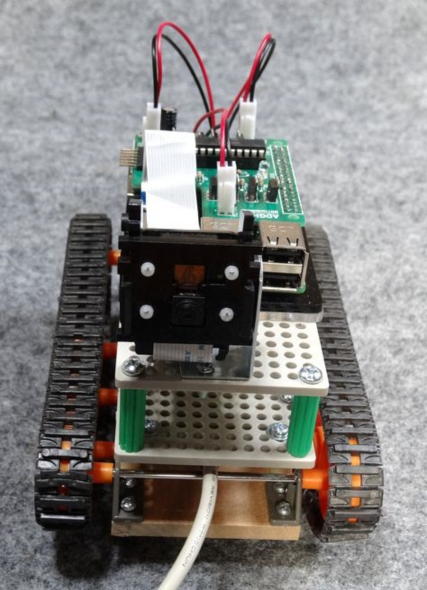 写真8 タンク車体の前面 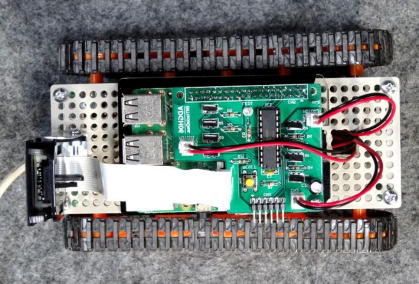 写真9 タンク車体の上部 |