趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< WiFi・カメラ付きリモコンカー製作 完了 >
やっと、いろいろありました周りの状況が少し落ち着いてきましたので、更新作業を再開したいと思います。 前回の更新作業からかなり時間が経ちましたので、途中経過をすっかり忘れてしまいました。 作業内容を思い出しながら書いてます。
「DCモーター制御ボード」にはPIC16F1508が載っています。 本ボードの制御用プログラムRobot2.cは、既に本書のダウンロードサイトから落としていますHexファイル、 Robot2.x.production.hexを、 MPLAB IPEでPICKit3を使って書きこみました。 書込みのPIC設定電圧は5Vです。(写真1、2、3)
書込みは成功し駆動テストを開始しましたが、前進は何とか動きますが左右への方向転換は、トルク不足で全く動かない状態です。 因みにType Aのギヤ比は12.7:1、回転トルクは94 gf・cmです。
トルクを上げるためにギヤ比Type Bと思いましたが、ギヤボックスに取付けられる6角シャフトの位置がType Aとは異なるので、写真4の通り同じ位置のType C(ギア比114.7:1、回転トルク809 gf・cm)としました。 結果は良好で、前後左右スムースに動くようになりましが、もう少し動きが遅い方がコントロールし易いと感じる程度の動きとなりました。
写真5、6が完成しましたカメラ付きリモコンカーの正面と側面の写真です。 そこそこいい感じにまとまりました。 写真7は、ラズパイが起動した状態の駆動テスト直前の写真です。 写真8はホストPCとWiFi接続し、ブラウザChromeでURLを http://ラズパイIPアドレス:8020/と指定し、予め設定したID、PWを入れた画面です。
無事接続されてコントロール画面(写真9)が表示されましたので、マウスを使い、先ずは左へ回転(写真10)、続いて右へ回転(写真11)、前進(写真12)、後進(写真13)し停止。
以上で完了ですが、ラズパイを使い、WiFiでカメラやロボットを制御する方法についての基本的な仕組みは理解できました。 いつかオリジナルなロボットもどきを作ろうかと思っています。 その時は、せっかくですから自作のグーグルAIスピーカで会話ができるようにしたいとも思いますね。
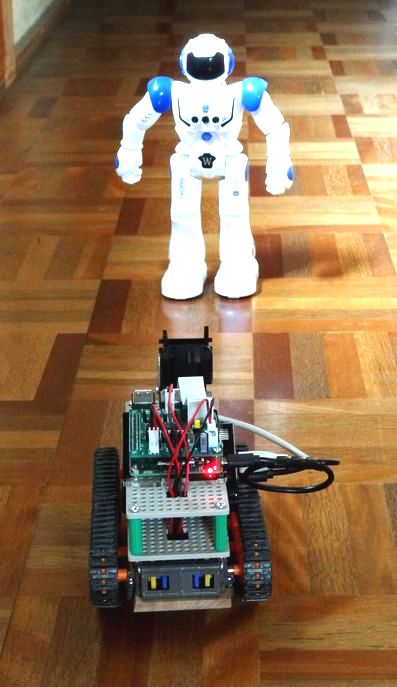
写真7 テスト状況
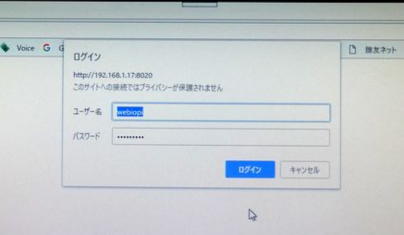
写真8 ホストPCとWiFi接続しID、PWを入力した画面
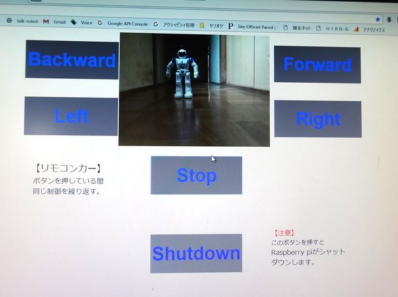
写真9 テスト開始直前画面
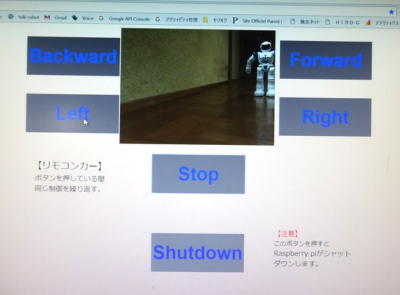
写真10 Left
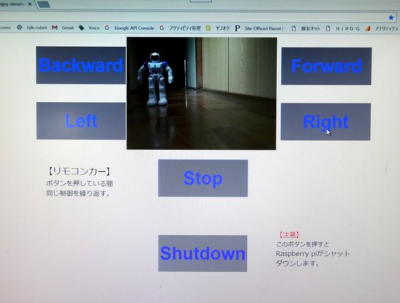
写真11 アRight
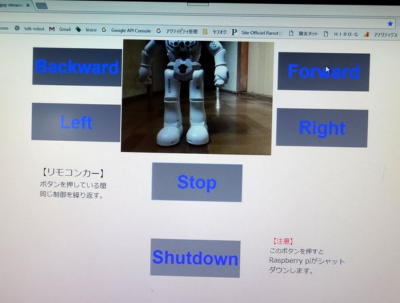
写真12 Forward
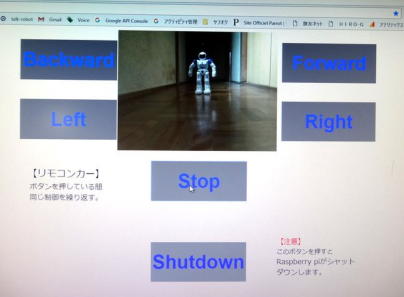
写真13 Backward & Stop
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

アラカルト No29
| WiFi・カメラ付きリモコンカー製作 完了 |
|---|
2018年8月9日 |
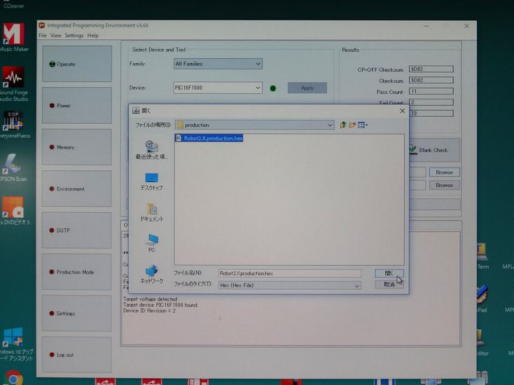 写真1 MPLAB IPA起動 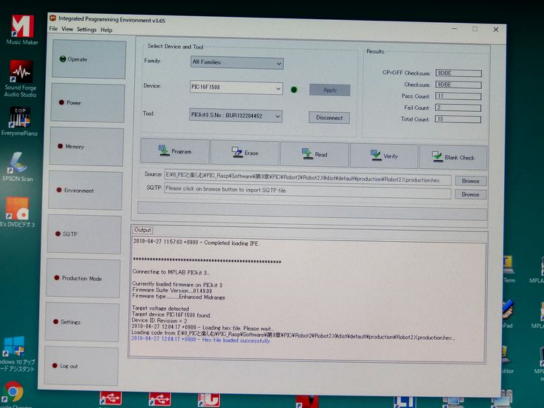 写真2 Robot2のHEXファイルを選択し書込み 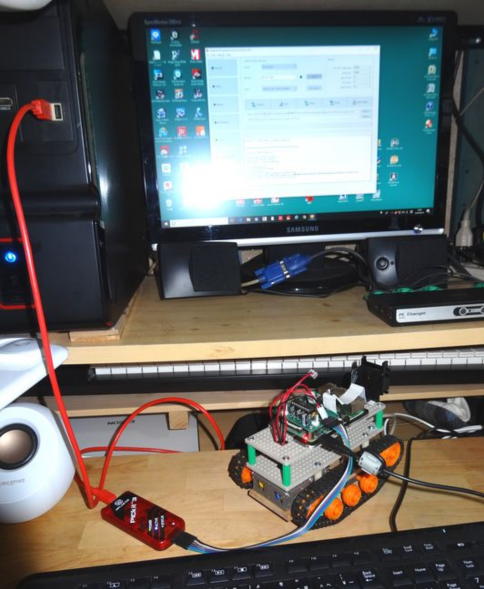 写真3 PIC3での書込み状況 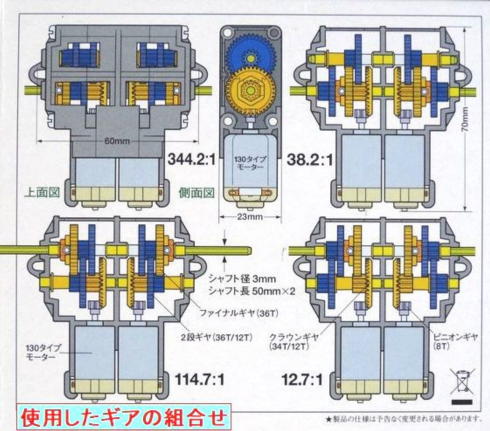 写真4 ギア比の決定(Type C) 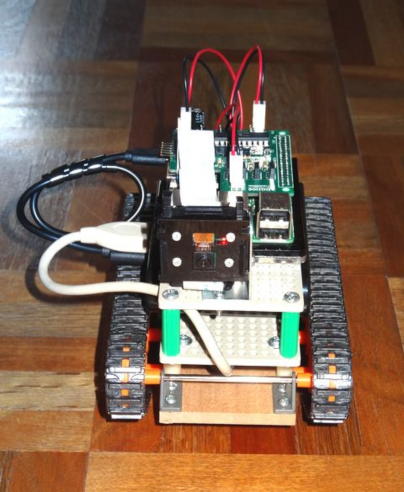 写真5 正面 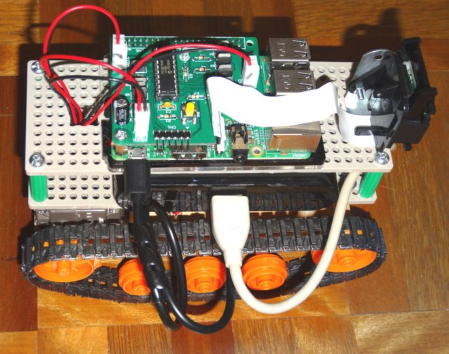 写真6 側面 |