庯枴岺朳丂俫俬俼俷亅俧偺僿僢僟乕
庯枴岺朳丂俫俬俼俷-俧
亙丂蛋氖卟郫膩iPi3亄NAVIO2乯丂僾儗僥僗僩丂亜
丂俶俙倁俬俷俀僼儔僀僩僐儞僩儘乕儔丒僔乕儖僪傪巊偭偨僆乕僩僷僀儘僢僩偺慡懱憸傪丄偄傑偄偪棟夝偱偒偰偄傑偣傫偱偟偨偺偱丄偁偭偪偙偭偪挷傋側偑傜帋峴嶖岆偺傛偆偵恑傔傑偟偨丅
丂傗偭偲偙偝丄俙俹俵乮俙倰倓倳俹倝倢倧倲丂俵倕倗倎乯側傞僆乕僾儞僜乕僗偺僾儔僢僩僼僅乕儉偵偮偄偰丄偍傏傠偘偵棟夝偱偒傞傛偆偵側傝丄僼儔僀僩僐儞僩儘乕儔乕偵搵嵹偡傞僼傽乕儉僂僃傾偼俤倣倢倝倓幮偺僒僀僩偺俶俙倁俬俷俀偺僪僉儏儊儞僩偵廬偄丄僼儔僀僩僐儞僩儘乕儔偺僴乕僪僂僃傾偱偁傞乽Raspberry Pi3乮儔僘僷僀俁乯亄俶俙倁俬俷俀乿乮埲崀丄乽俼倎倱俶倎倴倝僼儔僐儞乿偲婰偟傑偡丅乯偵僀儞僗僩乕儖偟丄僆乕僩僷僀儘僢僩偺僼儔僀僩僐儞僩儘乕儔乕偲偟偰壗偲偐摦偔傑偱偵側傝傑偟偨丅
丂偙傟傑偱偺嶌嬈偼帋峴嶖岆揑偵峴偄傑偟偨偺偱丄嬶懱揑側撪梕傪曬崘偡傞偨傔偵偼惍棟偡傞昁梫偑偁傝傑偡偺偱丄徻嵶偼丄惍棟傪恑傔側偑傜曬崘偟偨偄偲巚偄傑偡丅丂崱夞偼丄庢傝偁偊偢丄崱傑偱惢嶌偟偨斖埻偺僾儗僥僗僩傪幚巤偟偨寢壥偲恑捇忬嫷偺奣梫傪曬崘偟傑偡丅丂丂
丂幨恀侾偼丄俥係俆侽僼儗乕儉偵俼倎倱俶倎倴倝僼儔僐儞傪搵嵹偟丄庴怣婡丄俧俹俽丄揹尮儌僕儏乕儖丄儕億僶僢僥儕傿傪愝抲偟偰丄僪儘乕儞慡懱偲偟偰偺壖慻棫傪幚巤偟偨偺偑幨恀侾偱偡丅丂幨恀俀偼丄壩擖傟僥僗僩傪柍帠廔偊偨帪揰偱偺奺僷乕僣偺愝抲忬嫷偺徻嵶偱偡丅丂儌乕僞乕娭楢偼丄傑偩寢慄偟偰偄傑偣傫丅丂幨恀俁偼丄僥僗僩偵巊梡偟偨儕億僶僢僥儕傿偱偡丅丂場傒偵丄揹尮儌僕儏乕儖偺僐僱僋僞偼丄摉曽偑巊偄姷傟偰偄傞傕偺偵岎姺偟偰傑偡丅
丂僪儘乕儞傪抧忋僒僀僪偱憖嶌偡傞僷僜僐儞傗僞僽儗僢僩偼丄僌儔儞僪僐儞僩儘乕儖丒僗僥乕僔儑儞乮俧俠俽乯偲屇偽傟偰偍傝丄俧俠俽傊僀儞僗僩乕儖偝傟丄奺憖嶌傗挷惍傪峴偆偨傔偺僜僼僩僂僃傾偑丄乽俵倝倱倱倝倧値丂俹倢倎値値倕倰乿偱丄丂丂丂丂俙倰倓倳俹倝倢倧倲僒僀僪偐傜嵟怴斉傪僟僂儞儘乕僪偟傑偟偨丅丂
丂幨恀係偼丄乽俵倝倱倱倝倧値丂俹倢倎値値倕倰乿傪棫偪忋偘偨捈慜偺忬嫷偱偡丅俵倝倱倱倝倧値丂俹倢倎値値倕倰偼僂僀儞僪僂僘偟偐巊偊傑偣傫偑丄乽俙俹俵丂俹倢倎値値倕倰俀乿偼丄僂僀儞僪僂僘偺奜偵俵倎們傗Linux偵傕懳墳偟偰偄傑偡丅丂丂丂丂丂丂尰忬偼丄俵倝倱倱倝倧値丂俹倢倎値値倕倰偑峀偔巊傢傟偰偍傝忣曬検傕懡偄傛偆偱偡丅
丂幨恀俆偼丄倀俢俹丂侾侾俆俀侽侽偱俧俠俽偲乽俼倎倱俶倎倴倝僼儔僐儞乿娫偺丂丂W倝-俥倝愙懕偑妋棫偟丄僼儔僀僩丒僨乕僞偑儕傾儖僞僀儉偱昞帵偝傟丄俧俹俽偑尰嵼埵抲傪専嶕偟偰妋掕偟偨忬嫷偺夋柺乮抧恾夋柺偼丄堦墳丄儌僓僀僋傪偐偗偰偄傑偡丅乯偱偡丅
丂幨恀俇偼丄憲怣婡偺揹尮傪愗偭偨忬懺偱偺昞帵偱丄幨恀俈偑憲怣婡偺揹尮傪擖傟偨忬嫷偺幨恀偱偡丅丂憲庴怣婡偑惓忢偵婡擻偡傞偲丄丂幨恀俉丄幨恀俋偺傛偆偵乽俼俠庴怣婡偑偁傝傑偣傫乿偺昞帵偑徚偊傑偟偨丅
丂崱夞偺僾儗僥僗僩偺寢壥偐傜丄崱夞惢嶌偟偨僆乕僩僷僀儘僢僩丒僔僗僥儉偼堦墳惓忢偵婡擻偟偰偄傞傛偆偱偡丅丂丂師偺僗僥僢僾偼丄儌乕僞乕娭楢偺嬱摦晹傗奺婡擻偺挷惍丄僷儔儊乕僞偺愝掕摍傑偩傑偩帋峴嶖岆偺戝曄側嶌嬈偑巆偭偰偄傑偡偺偱丄弶僼儔僀僩偼偄偮偵側傞偙偲傗傜偺巚偄偱偡丅

幨恀俇丂憲怣婡偺僗僀僢僠偑俷俥俥偺忬嫷昞帵

幨恀俈丂憲怣婡傪僗僀僢僠俷俶

幨恀俉丂憲怣婡偺僗僀僢僠偑俷俶偺忬嫷昞帵

幨恀俋丂慡懱偑惓忢偵婡擻偟偰偄傞僼儔僀僩丒僨乕僞昞帵
亙丂俿俼俤倃係俆侽丂俽俹俷俼俿丂亜
丂俽俢倃偵懕偒捘棊丅
丂埲壓摨暥丅

僪儘乕儞丂No俀
| 蛋氖卟郫膩iPi3亄NAVIO2乯丂僾儗僥僗僩 |
|---|
俀侽侾俇擭侾侾寧俀侾擔 |
 幨恀侾丂慡懱偺壖慻棫偰忬嫷 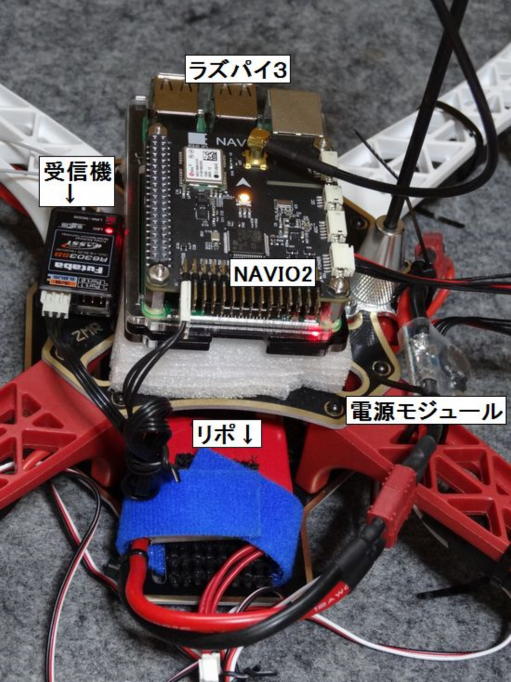 幨恀俀丂壩擖傟幃偲奺僷乕僣愝抲忬嫷  幨恀俁丂巊梡偟偨儕億僶僢僥儕傿  幨恀係丂乽俵倝倱倱倝倧値丂俹倢倎値値倕倰乿棫忋偘捈慜  幨恀俆丂俧俠俽偲乽俼倎倱俶倎倴倝僼儔僐儞乿偺捠怣偑妋棫偟偨忬嫷 丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂 |