趣味工房 HIRO-Gのヘッダー
趣味工房 HIRO-G
< オートパイロット(Pi3+NAVIO2) ビデオストリーミング >
前回で一応、Raspberry Pi3の内部Wi-Fiモジュールを使用してホストPC間との接続ができましたので、引き続いてFPVや空撮のためのリアルタイムのビデオストリーミング機能を搭載する作業を実施しましたが、作業を進めるに従がっていろいろ調べる事が増えてきましたので、詳細をまとめる時間がありません。 詳細は後ほどとして前回同様、今回も進捗報告のみになります。
ビデオストリーミング作業に入るために、カメラをヤフオクで、とカメラマウントはPIMORONIにて調達しました。
① カメラ: Raspberry Pi Camera V2
② カメラマウント: パン・チルトHAT (Full kit)
PIMORONIではついでにRaspberry Pi3、Zero、16ChPWMモジュール、Roving Robot等も調達してしまいました。
入手のカメラマウントは、Raspberry Piハット仕様で取付はピッタリ決まりますので、取りあえずは写真1、写真2のようにNAVIO2の上に重ねて取り付け、次のコマンドでカメラの設定と作動確認を行いました。 サーボモータは何れもまだ接続していません。
① sudo raspi-config コマンドでEneble Cameraを設定。
② raspistill -v -o test.jpg コマンドで画像を確認。
ドローンの準備はできましたが、ホストPCとしては、野外の使用も考慮してGatewayのノート(CPUがCeleron M)を使っていますが、古すぎてどうも「Mission Planner」(以下MPと表記)を走らせるのは荷が重いので、ヤフオクで Core i5のNEC VersaProを入手しました。 今まで、MPの起動や操作にストレスを感じてましたが、NEC VersaProは、ストレスなしにクサク動いてくれます。
準備を完了しNAVIO2 docsに従がってビデオストリーミングの設定作業に入りましたが、説明文が簡潔に書かれているので、初心者の当方にはコマンドの意味が理解出来ず、ビデオストリーミングの何たるかから調査を始めざるを得ませんでした。
調査するなかで、NAVIO2 docsで使われているビデオストリーミング用の送受信機3DR Radio V2も入手しましたが、900MHzと433MHzのバリエーションがあり、最大送信出力が100mWもあるので電波法に触れる恐れがあり、電波法の調査にも時間が取られました。
結果、どうもアマチュア無線4級の資格が要るようなので、無資格でテストできる方法について調査し、Wi-SUNを含め920MHzの現状も調べましたが、機器関係の環境が今ひとつですので今回は保留とし、結局、Wi-Fi接続で出来る範囲を検討しました。
Raspberry Piを使ったビデオストリーミングのサイトを中心に調査した結果、次のサイトを含めいくつかのサイトを参考にNAVIO2 docsを解読しました。
① Gstoreamerを使ったビデオストリーミング
② Raspberry PiカメラでUDPストリーミング
結果的には、ホストPCには、Windows用のGstreamerをダウンロードして、コマンドプロンプトによる起動で対応し、「RasNavi フラコン」(Raspberry Pi3+NAVIO2)サイドは、起動時にビデオストリーミング機能が自動立上げするように次のコマンドラインを /etc/rc.local ファイルに予め書き込んでおきます。
raspivid -n -w 1280 -h 720 -b 1000000 -fps 15 -t 0 -0-|
gst-launch-1.0 -v fdsrc ! h264parse rtph264pay
config-interval=10 pt=96 ! udpsink host=<hostPCnoIPアドレス>
port=9000
以上の作業の結果、Wi-Fi通信で、写真3、写真4のように、PCの拡張表示機能で2台のディスプレイを使い MPとビデオストリーミングの画像を同時表示することが可能となりました。
因みに写真5は今回のテストの全景です。
やっとこさで、MPとビデオストリーミングが機能することを確認しましたので、詳細は後ほどとして初フライトに向けて各機器の調整に入りたいと思います。
結構な重量ですので浮かび上がるのかなぁ、と思っていますが。

写真4 Mission Plannerとビデオストリーミング同時表示テスト

写真5 テスト全景
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

ドローン No3
| オートパイロット(Pi3+NAVIO2) ビデオストリーミング |
|---|
2017年1月17日 |
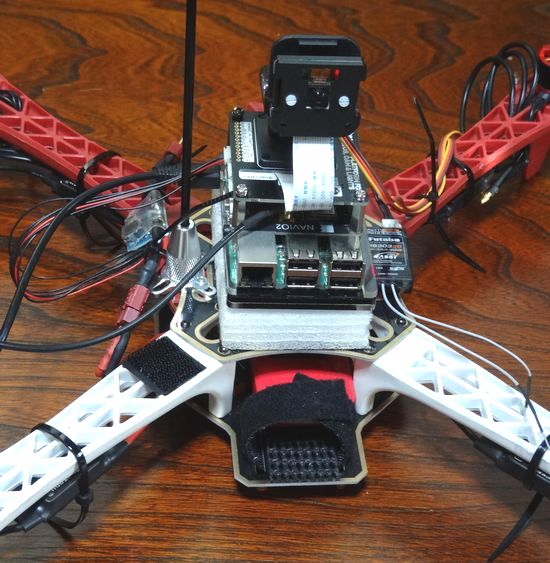 写真1 カメラマウントを取り付けた状況(正面) 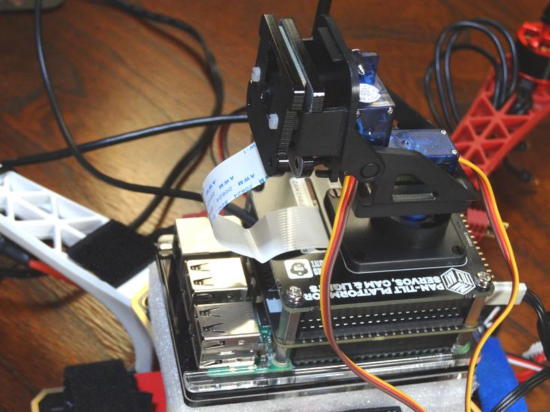 写真2 カメラマウントを取り付けた状況(側面)  写真3 ビデオストリーミングのテスト |