趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< オートパイロット(Pi3+NAVIO2) システムテスト >
前回、AR.Drone2のコントローラーとして、HUAWEI社のタブレットMEDIAPAD M3 BTV DL09AにQGround Controlをインストールして飛行テストを実施しながらQGround Controlの使い方を学びましたが、Emlid社のHPによれば、あくまでもGCS(グランドコントロールステーション)はMissonPlanner(MP)であり、QGroundControlはビデオストリーミング用として使用しているだけです。
写真1が今回テストしました、屋外でオートパイロットの飛行テストを実施するための基本システム構成です。 今までは屋内でNTTの既設の無線LANルーターを使用していましたが、屋外での使用を考え新たにUSB電源で使えるプラネックスのマルチポケットルーターMZK−MF300Nを入手しました。 これで一応、屋外でオートパイロットシステムのテスト飛行がが可能となるはずですが・・・・。
写真2は既に、「ドローン No2」で報告済みのGCSのMissonPlannerの起動画面ですが、今回は、F450のフラコン(Pi3+NAVIO2)からのテレメトリ信号をマルチポケットルータ(APモード)を介し、無線LANにてGCSのホストPCで受けています。 ルーターとPCはUSB接続されていますが、これはPCから電源を供給しているだけです。
写真3は、F450に取り付けられたカメラで撮った動画を、フラコンからビデオストリーミングとして送信し、マルチポケットルータ(APモード)を介して受信したものを、タブレットにインストールしたQGround ControlのFly Viewモードにて映像として表示している写真です。
写真4は同様に、PC画面そのものを被写体として伝送してみただけの写真です。
写真5、6は、タブレットホルダーをFUTABAの送信機T8FG(14CHモード)に取り付けた状態の写真です。 タブレットが8.4インチで結構大きめですので、いろいろ検討しました結果、取りあえずは中華製を購入し、MediaPad M3ケースをマジックテープで張り付けて、写真7のようにタブレットをそのケースへはめ込む方法で固定しています。
次のステップはいよいよフライト前の初期設定とキャリブレーションの実務作業となります。 何とかオートパイロットの構築の方法も理解できるようになりましたが、今後の課題も分かってきました。 今後の課題はズバリ、無線LANの通信速度と通信距離と考えています。 これは当方だけの問題ではなく、電波法が絡むラジコン界が抱えている大きな課題のひとつであると思います。
現状では、通信距離と通信速度をそこそこ満足させるためには、アマ4級の資格が必要のようですが、取りあえず無免許でどこまでやれるかを見極めて、必要があれば、アマ4級を飛び込み受験または有料の講習を受けて取得することを考えてみたいと思っています。

写真5 タブレットホルダー取付(正面)

写真6 タブレットホルダー取付(側面)

写真7 タブレット取付
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

ドローン No5
| オートパイロット(Pi3+NAVIO2) システムテスト |
|---|
2017年3月29日 |
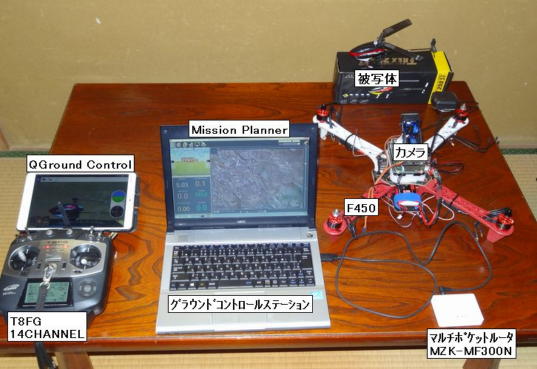 写真1 オートパイロット(Pi3+NAVIO2) システムテスト風景その1 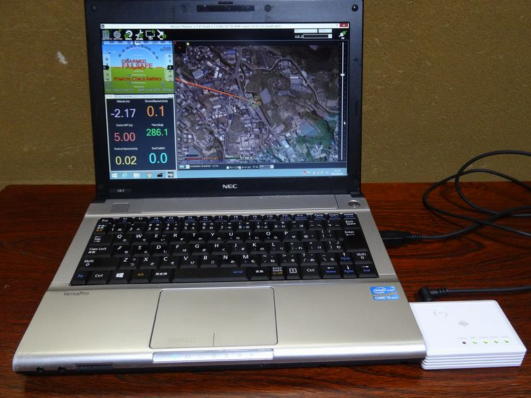 写真2 Misson Planner起動画面  写真3 QGroun Control 起動画面  写真4 オートパイロット(Pi3+NAVIO2) システムテスト風景その2 |