趣味工房 HIRO-G
昨年から手を付ける予定でしたが、CP/Mマシン等に注力してましたので、KHR-2HV関連は全く手付かずでした。 ようやく手を付ける余裕が」出てきましたが、バイブル的資料の写真1の書籍「二足歩行ロボット自作入門」、副題は「60日でできる!二足歩行ロボット自作入門」(初版:2007年8月、 発行:毎日コミュニケーションズ)の内容をゆっくり眺めましたが、当方にとりましては、ハードの組立ては特に問題はありませんが、H8なるものを良く分かっていませんし、Visual C++、Visual BASIC等のソフト面も、かなりハードルが高いようです。
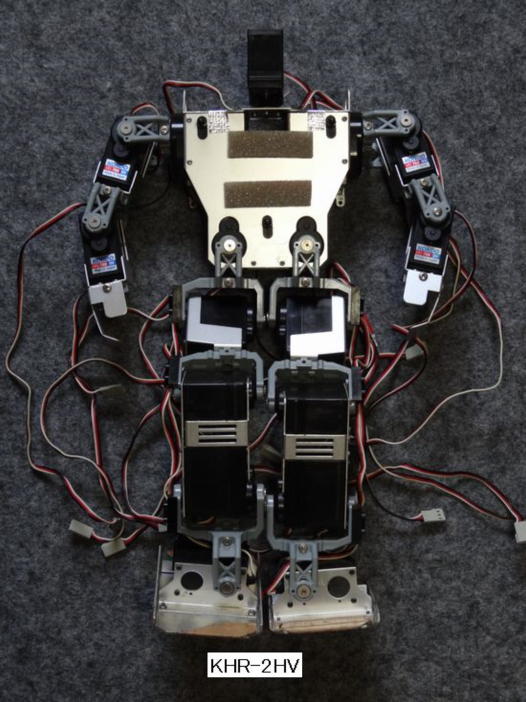
写真3が今回使用するKHR-2HVで、かなり以前にヤフオクで落札したものです。 正常に動いていますが、またまた困った性分で、敢えてコントロールボードを作り、動かすことでサーボ、ジャイロ、各種センサーの取り扱いを知ろうという魂胆です。 まあ、いろいろ学べるのでかなり面白いと思っています。
しかしながら、とても書籍の通り60日間では達成できませんので、この書籍に従って、当方得意のチマチマのスタイルでやって行こうと思っています。 が、一番、ネックとなりそうなのは、この書籍のロボットは、サーボが13個(自由度13)ですが、KHR-2HVはサーボが17個(自由度17)ですので、4個分の処理をどうするかです。 心強いのは、筆者の「吉野耕司さん」が、今でもHP「吉野ロボット」でいろいろフォローされている事です。
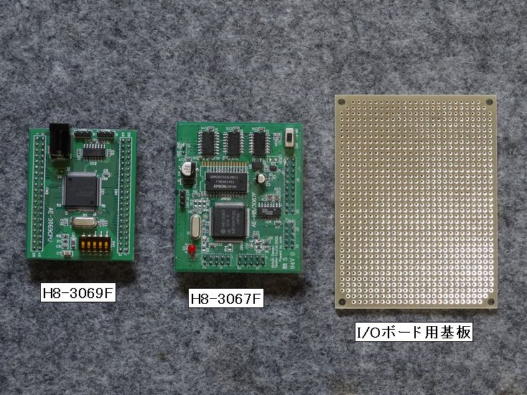
この書籍でコントロールボード(この書籍ではマイコンボードと記載)に使用するH8は3067Fですが、吉野さんのHPでは、代替品として3069Fも使用されていますので、写真2のように、取敢えず両方のボードを秋月電子通商で入手しました。 因みに秋月電子通商の67F、69FのURLは 「ルネサスH8マイコン」 です。