趣味工房 HIRO-Gのヘッダー
趣味工房 HIRO-G
< コントロールボードの製作完了&作動テスト >
資料「二足歩行ロボット自作入門」、副題は「60日でできる!二足歩行ロボット自作入門」の内容に従って進めています。 進捗状況はコントロールボードが完成しましたので、写真1のように資料の「7日目」に入ったところです。
写真2が今回、製作したコントロールボードです。 資料に従い、現状では13個のサーボをコントロールするように配線しています。 写真3は、コントロールボードをベース部分とAKI-H8/3967Fボードを切り離した状態の写真です。
写真4は、外部PCのシリアルポートと接続する時に、使い勝手を良くするために作った、RS232Cの汎用テストボードです。 今回は、PCから引っ張ってきたケーブルをにD-Sub9ピンのコネクタに接続し、資料のP92~93に従い、にD-Sub9ピンコネクタの4ピンと6ピンは、4芯の接続ケーブルの1本を使い接続し、7ピンと8ピンはジャンパーピンで接続しました。
写真5が接続ケーブルを使って、コントロールボードのJ5コネクタと汎用テストボードを接続した状態です。 因みにD-Sub9ピンコネクタの2ピンとJ5ピンのLTX、3ピンとLRX、5ピンとGND(真ん中のピン)を接続します。 この汎用ボードは、今回以外のRS232Cのテストにも、目的に応じた接続ケーブルを用意すれば、ハンダ付けの手間が要らずに、いろいろ使えて便利です。
コントロールボードを使用するためには、先ずは、資料P97~101に従い、付属CDのライターソフトを使ってモニタデバッガソフト「MODE5」をフラッシュメモリへ書き込みます。 写真6は定電圧電源(電池でもOK)を含めた全体の接続状態で、電源はDC6V~7V程度、使用したターミナルソフトは、お馴染みの「Tera Term Pro」です。 写真7は、書き込んだモニタデバッガが正常に作動するかテストした画面で、結果はモニタデバッガの開始メッセージが表示されました。
無事、コントロールボードの製作が完了しましたので、今後はコントロールボードを使い具体的な作業へ入ります。
写真1 進捗状況
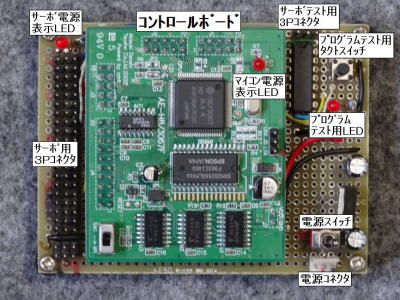
写真2 コントロールボード全体
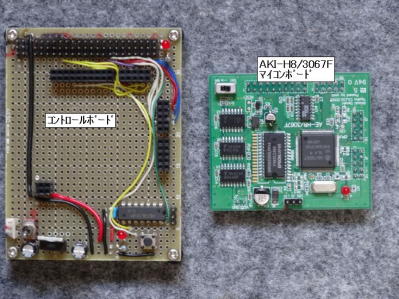
写真3 コントロールボードの分割
< 今後の予定 >
① コントロールボードの製作&作動テスト: 完了
② コントロールボードの基本テスト:
③ KHR-2HVへの搭載テスト:
④ 自由度17への対応の検討:
ロボット No6
| コントロールボードの製作完了&作動テスト |
|---|
2014年6月5日 |
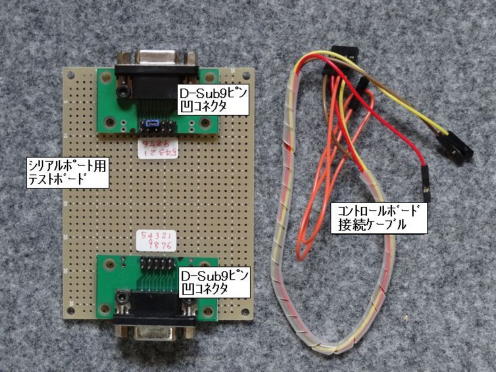 写真4 RS232C汎用テストボードと4芯接続ケーブル 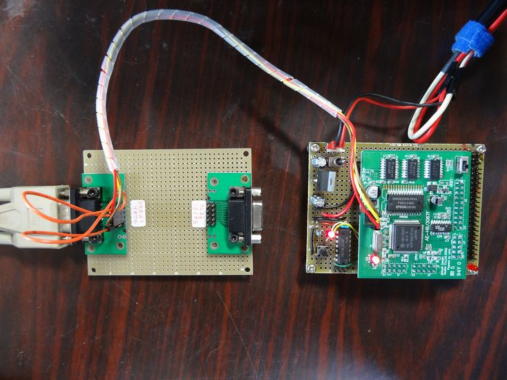 写真5 コントロールボードと汎用テストボードの接続状態1 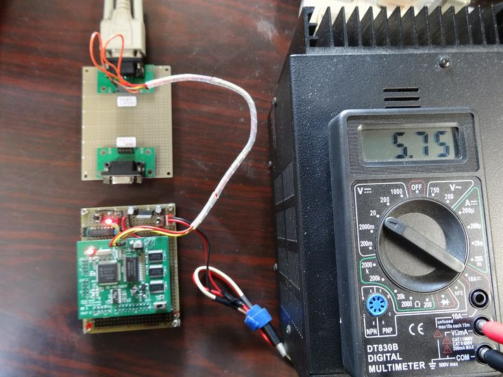 写真6 ントロールボードと汎用テストボードの接続状態2 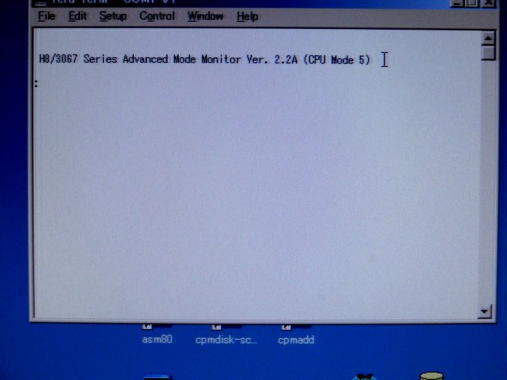 写真7 モニタデバッガの作動テスト結果 |