趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< カルマン 2輪倒立振子の製作 その1 >
またまた、日にちがあっという間に過ぎ去って8月も下旬となってしまいましたが、トラ技2019年7月号に「月着陸船アポロに学ぶ確率統計コンピュータ」の特集がありました。(写真1)
現役時代から「確率と統計」に関するSQCやデータ分析には興味がありましたので、興味深々で記事を読みましたところ、加速度やジャイロセンサを使い「2輪車の倒立振子」を制御する内容で、その制御方法に確率統計を応用した「カルマン・フィルタ」なるものを使うらしいということが分かり、えらい面白そうなので、トライしてみます。
早速、同書のP39の「部品表(写真2)」に従い在庫部品を確認しながら、発注部品をリストアップするとともに、同書のP54の回路図(写真5)の確認をしました。 2個の全く同じモータ・ドライバ回路がありますが、220μF電解コンデンサが不自然に2個必要な回路となっておりアレッと思っておりました。
が、CQ出版社から、数量限定でキットが発売されるとのアナウンスがあり、同時にキットの組立マニュアルが公表され、その組立マニュアルの回路図(写真6)を見ますと、当該電解コンデンサは470μFに変更され、取付位置も2系統の電源回路上に1個づつ配置するようになっていました。 これが普通ですので、トラ技の回路は、写真5のように変更することとしました。 因みに、現在はキットは販売は終了しており、そのマニュアル関係の資料も削除されていまSQCいた。
パーツはロータリーエンコーダ「EC202A100A」(千石電商)以外は秋月電子から購入しました。 何れも通販を利用しましたが、ロータリーエンコーダ用のハーネス(A150)は別売ですが、同時に購入しておく方がよい。です。
先ずは、ARMマイコン 「NUCLEO−F401RE」とセンサ・モジュール「AE−BMX055」及びモータ・ドライバ「TA7291P」で構成された制御ボードを組み立てましたが、部品点数も配線数もそれほど多くないため、キットを購入するまでもありませんね。
組立で注意することはあまりありませんが、センサ・モジュール「AE−BMX055」(写真3)は、ヘッダーピンを取付ける前に、トラ技のP40に従い裏面の指定されたジャンパー(JP4、JP5、JP7、JP8)を接続しておくことを忘れないようにします。(写真4)
ARMマイコン 「NUCLEO−F401RE」のピンアサインは写真7の通りで、今回は赤丸印のピンのみが使われています。 写真8が今回製作した制御ボードです。 写真9がボードの配線状況ですが、スイッチやLED等の配置を変更すればもう少しスマートに配線できますが、取りあえずはトラ技に準じて配置しました。
以上で制御ボードの製作は完了です。 今後はトラ技の付属DVDの「プログラム一覧」に従って、データ通信、傾斜計等のテストを実施します。 その後、2輪車のハード部分を製作して、全体のテストをする予定です。
写真1 「月着陸船アポロに学ぶ確率統計コンピュータ」の特集
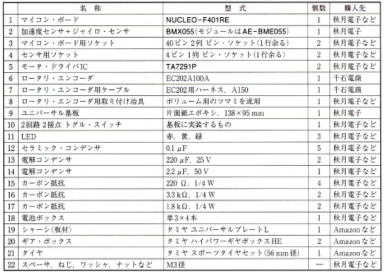
写真2 部品表
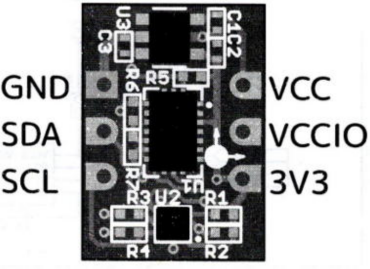
写真3 センサ・モジュール「AE−BMX055」
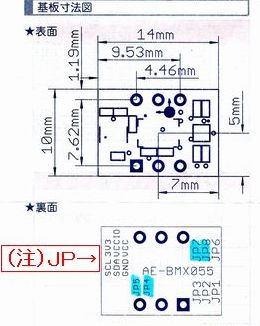
写真4 センサ・モジュールのJP図
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

アラカルト No30
| カルマン 2輪倒立振子の製作 その1 |
|---|
2019年8月24日 |
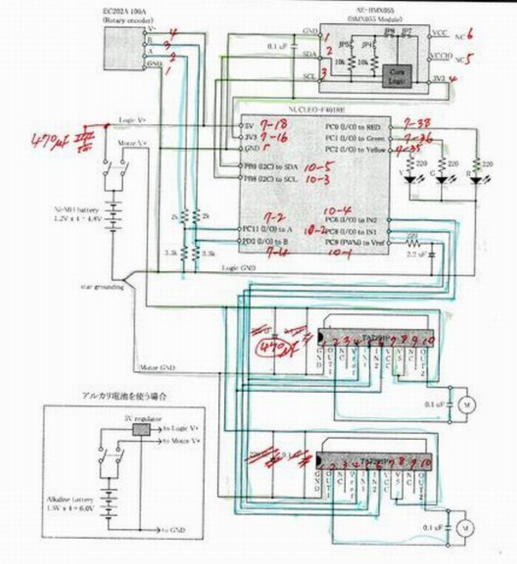 写真5 トラ技本誌の回路図 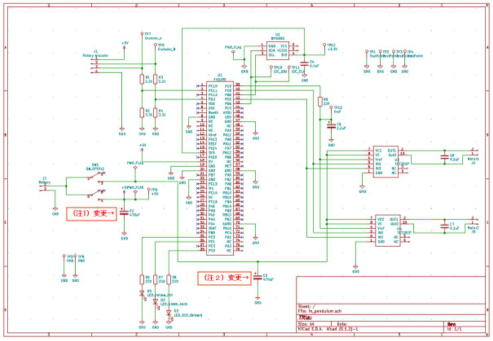 写真6 販売キットの回路図 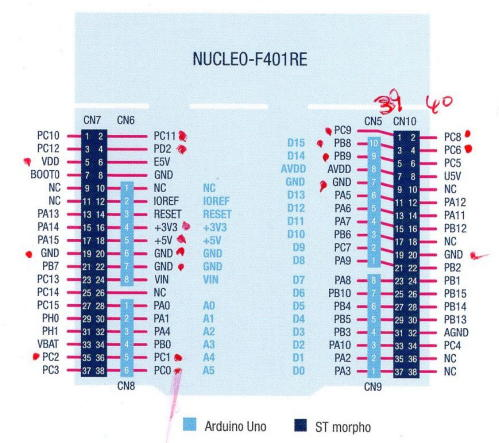 写真7 「NUCLEO−F401RE」のピンアサイン 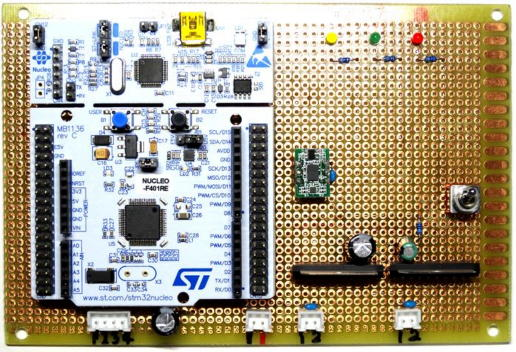 写真8 制御ボード 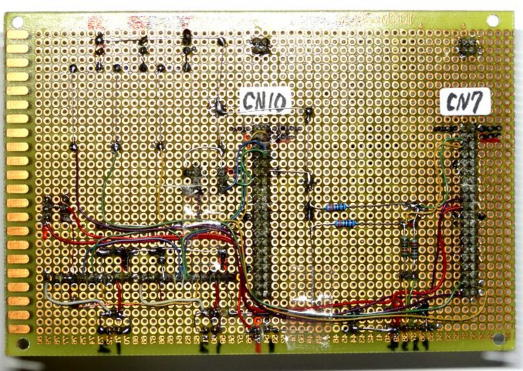 写真9 制御ボードの配線状態 |