趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< Jetson Nano 定番VisionWorksデモの実行 >
前回のCUDAのデモの操作でJetson Nano 2GB版の扱いも少し慣れましたので、引き続いてJetpackに収録されている写真1の一覧にある「VisionWorks」のデモをテストしました。
VisionWorksもデモの定番のようですが、は、カメラ等で撮影した動画をリアルタイムで解析して、その結果を映像に付加して表示するデモです。
前回同様にCLI(写真2)で作業領域にVisionWorksのsamplesをコピーします。 コピーの結果は、写真3のようにhomeディレクトリ内にVisionWorks-1.6-samplesのディレクトリが作成されてます。
同様に実行ファイルを作成するために、VisionWorksのディレクトリへ移動し、makeコマンドを実行しました。
$ cd VisionWorks-1.6-samples
$ make -j4 # add dbg=1 to make debug build
VisionWorksのデモの実行ファイルは、makeを実行したディレクトリ内の bin/aarch64/linux/release に作成されます。
実行ファイルが生成されたディレクトリへ移動して確認。
$ cd bin/aarch64/linux/release
$ ls
写真4のようにnvxから始まる緑色の実行ファイルが作成されているのを確認しました。
デモの実行は定番通りに、「Feature Tracker」、「ObjectTracker」、及び「motion estimation」の順に試しました。
テスト時にはいろいろとディレクトリを移動しますが、デモの実行時は、常に実行ファイルがあるディレクトリへ移動しておくことを忘れないように注意が必要です。
以下のデモの実行例も、実行ファイルのあるディレクトリに移動しているものとして説明しています。
< Feature Tracker の実行 >
「Feature Tracker」実行ファイルは、「nvx_demo_feature_tracker」ですので、CLIで次のようにコマンド入力して、実行させたのが写真5です。
$ ./nvx_demo_feature_tracker
写真6は、実行画面のアップですが、赤い点は目的物や構造物の境界点を捉えて特徴(Feature)を認識しており、緑色の矢印は移動の方向とそのスピードを表しているようです。
< Object Tracker の実行 >
同様に「Object Tracker」実行ファイルは、「nvx_sample_object_tracker_nvxcu」ですので、CLIで次のようにコマンド入力して、実行させたのが写真7です。
$ ./nvx_sample_object_tracker_nvxcu
実行直前は車が走行した状態ですがしばらくすると停止状態となりますので、マウスで対象車(Object)を四角でマーキング(写真8)します。 マーキングすると車が再度走り出すので、素早くキーボードの「V」キーを押します。
「V」キーを押すと四角のマーキングの中に赤丸の印が表示され、写真9のように追跡モードになります。 追跡モードになれば車線変更(写真10)をしても追跡し続けます。 デモですので10秒程で停止画面になりますが、何度も試すことができます。
< motio estimat の実行 >
実行ファイルは、「nvx_demo_motion_estimation」で、CLIで次のようにコマンド入力して、実行させたのが写真11です。
$ ./nvx_demo_motion_estimation
写真12は、公園風なところを歩いている複数人の進む方向を、複数の水色の矢印が示している画面のアップです。
写真13には、街灯の柱の陰になっているが、犬の歩いていく方向も矢印が示しているので、対象は人に限らず、移動している物について表示されるのではないかと思われます。
写真14は、更に画面を拡大したものですが、複数の水色の矢印が進行方向を示しているのがわかります。
この分解能力からすれば、立ち止まって手足等を移動すれば、その方向を示すこともできそうな感じですが、どうでしょうか。
次の定番は、「物体検出」へ進むのが定番のようですが、ensorFlow、PyTorch、ONNX、TensorRT等、ちょこっと聞いたことがある用語がズラッとでてきますので、これから先に進むには、そろそろディープラーニングの基本を学ぶ必要がでてきました。
忘れかけているPythonも当然絡んできますので、ボチボチやるしかありません。
to AI No1-3 to AI No1-5
to 新テク・アラカルト
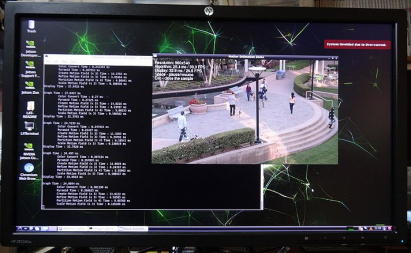
写真11 motion estimationデモ実行画面
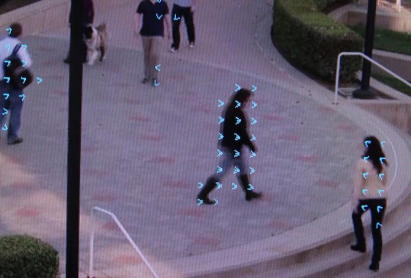
写真12 motion estimationデモ実行アップ画面その1

写真13 motion estimationデモ実行アップ画面 その2
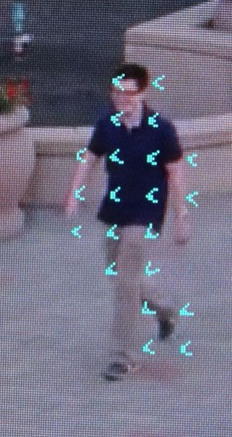
写真14 アップ画面その3
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

AI No1-4
| Jetson Nano 定番VisionWorksデモの実行 |
|---|
2021年2月14日 |
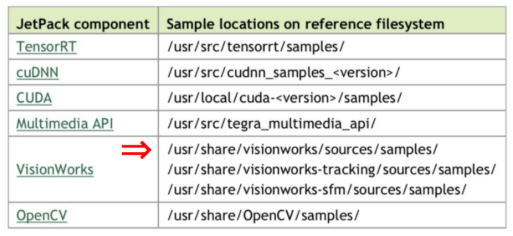 写真1 JetPackのサンプル一覧 VisioWorks選択  写真2 VisioWorksファイルのコピー  写真3 コピーの結果 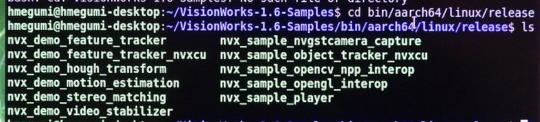 写真4 samplesの実行ファイル(nvx)の確認  写真5 Feature Trackerデモの実行画面 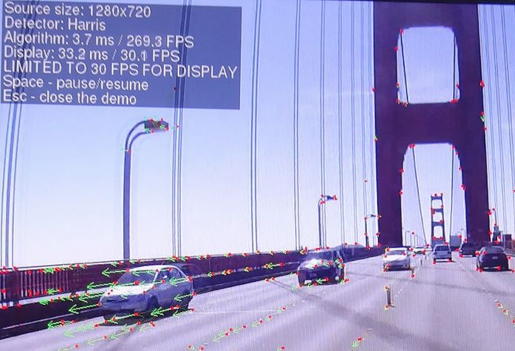 写真6 Feature Trackerデモの実行画面のアップ  写真7 Object Trackerデモの実行画面  写真8 対象車(Object)のマーキング実行画面  写真9 対象車(Object)のマーキング追跡画面その1  写真10 対象車(Object)のマーキング追跡画面その2 |