ژï–،چH–[پ@‚g‚h‚q‚nپ|‚f‚جƒwƒbƒ_پ[
ژï–،چH–[پ@‚g‚h‚q‚n-‚f
پ@پ@
پ@پ@پ@پƒپ@JetBot‚جگ»چى‚»‚ج‚Uپ@ڈص“ث‰ٌ”ً‘–چsƒeƒXƒg‚Pپ@پ„
پ@‚¢‚و‚¢‚وƒfƒBپ[ƒvƒ‰پ[ƒjƒ“ƒO‚ج‹Zڈp‚إپAڈص“ث‚ً‰ٌ”ً‚µ‚ب‚ھ‚çژ©“®‘–چs‚·‚éپuJetBotپv‚ةپAƒoپ[ƒWƒ‡ƒ“ƒAƒbƒv‚·‚éچى‹ئ‚ة“ü‚è‚ـ‚·‚ھپAگو‚¸‚حپA‘O‰ٌ‚جƒeƒXƒgŒ‹‰ت‚©‚ç‘–چsگ«‚ًڈم‚°‚邱‚ئ‚ئ–{‘ج‚ج“dŒ¹‚جˆہ’èگ«‚ًٹm•غ‚·‚邽‚ك‚ة“dŒ¹‚ًƒ‚پ[ƒ^—p‚ئ–{‘ج—p‚ج2Œn‚ئ‚µ‚ـ‚µ‚½پB
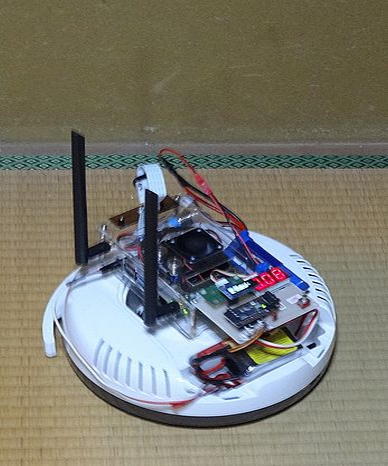
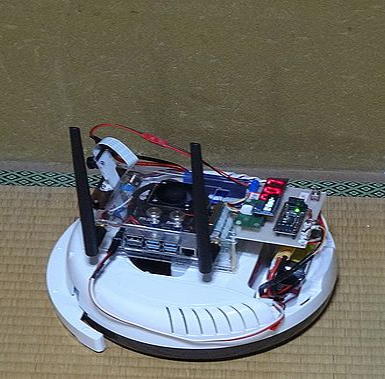
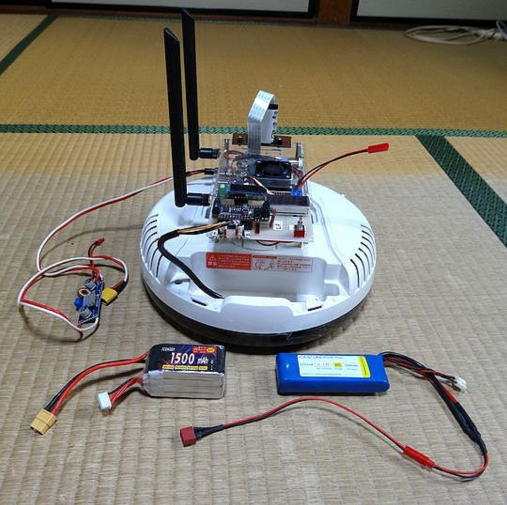
پ@–{‘ج‚ج“dŒ¹‚حŒ»ڈَ‚ج‚ـ‚ـ‚إپAƒ‚پ[ƒ^‚حƒoƒ“ƒ_ƒCگ»‚جJXDپ@RK-370پi‚WVپA8000rpmپjŒn‚ج‚و‚¤‚إ‚·‚ج‚إپAƒ‚پ[ƒ^—p‚ئ‚µ‚ؤپAژلٹ±“dˆ³‚ھ’ل‚ك‚إ‚·‚ھپADC-DCƒRƒ“ƒoپ[ƒ^‚ًژg—p‚µ‚ب‚¢‚إچد‚ف‚ـ‚·‚ج‚إپAژèژ‚؟‚جƒٹƒ|ƒoƒbƒeƒٹپi2ƒZƒ‹پA‚VپD‚SVپA‚Q‚T‚O‚OmAhپj‚ًژg‚¤‚±‚ئ‚ئ‚µ‚ـ‚µ‚½پBپiژتگ^‚Pپj
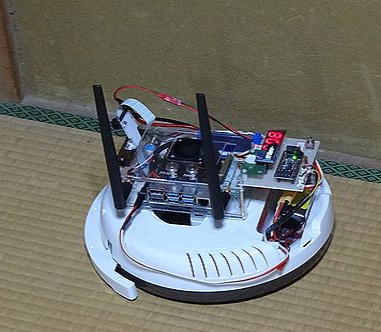
پ@ژہ‚حژتگ^‚Q‚جڈَ‘ش‚إپA—\”ُ“I‚ةپuCollionپ@Avoidanceپ@Liveپ@Demoپv‚ً‰½“x‚©ژہژ{‚µ‚ـ‚µ‚½‚ھپAڈص“ث‰ٌ”ً‚ھڈمژè‚‹@”\‚µ‚ب‚©‚ء‚½‚½‚كپA‚¢‚ë‚¢‚ë’²‚ׂـ‚µ‚½Œ‹‰تپAپubest_model.pthپv‚ھ–³‚¢‚±‚ئ‚ة‹C•t‚«‚ـ‚µ‚½پBپ@
پ@ƒCƒ“ƒXƒgپ[ƒ‹‚³‚ê‚ؤ‚¢‚ب‚©‚ء‚½‚©پANotebook‚ً‚¢‚ë‚¢‚ë‚¢‚¶‚ء‚ؤ‚¢‚½ژ‚ةڈء‚µ‚ؤ‚µ‚ـ‚ء‚½‚©پA‹L‰¯‚ة‚ب‚¢‚ج‚إ’è‚©‚إ‚ح‚ ‚è‚ـ‚¹‚ٌ‚ھپAڈ‰گSژز‚جژ„‚حپAپuٹwڈKچد‚فƒ‚ƒfƒ‹‚ھ’ٌ‹ں‚³‚ê‚ؤ‚¢‚éپBپv‚ئ‚جگà–¾‚إپA‚ؤ‚ء‚«‚è‘g‚فچ‚ـ‚ê‚ؤ‚¢‚é‚à‚ج‚ئژv‚¢چ‚ٌ‚إ‚¨‚è‚ـ‚µ‚½پBپ@
پ@پ@‚ ‚炽‚ك‚ؤ–{‘ج‚ةƒfƒBƒXƒvƒŒƒCپAƒLپ[ƒ{پ[ƒhپAƒ}ƒEƒX‚ًژو•t‚ؤƒOپ[ƒOƒ‹‚ً—§‚؟ڈم‚°‚ؤپAExamplesƒTƒCƒg‚©‚çپubest_model.pthپv‚ًƒ_ƒEƒ“ƒچپ[ƒh‚µ‚ـ‚µ‚½پBپiژتگ^‚Rپj
https://github.com/NVIDIA-AI-IOT/jetbot/wiki/exmples
پ@Examplesپiژتگ^‚Sپj‚جExample3-Collision avoidance‚جStep1‚جچإڈ‰‚ة‚ ‚éپupre-trained model]پiگآ•¶ژڑپj‚ًƒNƒٹƒbƒN‚·‚é‚ئپAژتگ^‚T‚ج‚و‚¤‚ةپuƒ_ƒEƒ“ƒ“ƒچپ[ƒhپv‚ھ•\ژ¦‚ة‚³‚ê‚é‚ج‚إƒNƒٹƒbƒN‚µ‚ؤƒ_ƒEƒ“ƒچپ[ƒh‚ًژہژ{‚µ‚ـ‚µ‚½پB
پ@homeƒtƒHƒ‹ƒ_‚ًٹJ‚«پADown‚Œo‚’dsƒtƒHƒ‹ƒ_‚ًٹm”F‚·‚é‚ئپAٹm‚©‚ةپubest_model.pthپv‚ھƒ_ƒEƒ“ƒچپ[ƒh‚³‚ê‚ؤ‚¢‚ـ‚µ‚½‚ج‚إپANotebooksƒtƒHƒ‹ƒ_‚جCollision AvoidanceƒtƒHƒ‹ƒ_‚ضƒRƒsپ[‚µ‚ـ‚µ‚½پiژتگ^‚XپjپBپ@
پ@‚â‚ء‚ئپuٹwڈKچد‚فƒ‚ƒfƒ‹پv‚ًژg‚ء‚ؤ‚جژ©“®‘–چsƒeƒXƒgٹآ‹«‚ھگ®‚ء‚½‚ج‚إپAگو‚¸‚حپAژتگ^‚P‚O‚ج‚و‚¤‚ةJetBot‚ً‹N“®‚µPiOLED‚إIPƒAƒhƒŒƒX‚ًٹm”F‚µ‚ـ‚·پBپ@•ہچs‚µ‚ؤƒzƒXƒgPC‚جƒuƒ‰ƒEƒU‚ً—§‚؟ڈم‚°پAٹm”F‚µ‚½IPƒAƒhƒŒƒX‚إJetBot‚ئگع‘±‚µ‚ـ‚·پB
پ@ƒzƒXƒgPCڈم‚إژتگ^‚P‚PپA‚P‚Q‚ج‚و‚¤‚ةNootbooks‚©‚çCollisionAvoidanceƒtƒHƒ‹ƒ_‚ًٹJ‚«پubest_model.pthپv‚ھƒRƒsپ[‚³‚ê‚ؤ‚¢‚邱‚ئ‚ًٹm”F‚µ‚ـ‚µ‚½پBپA
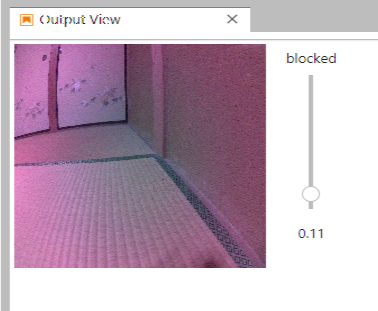
پ@ٹm”FŒمپAڈ‡ژںƒRپ[ƒh‚ًژہچs‚µ‚ـ‚·‚ھپA5ƒuƒچƒbƒN–ع‚جƒRپ[ƒh‚ًژہچs‚µ‚ـ‚·‚ئپAژتگ^‚P‚R‚ج‚و‚¤‚ةƒJƒپƒ‰‚ج“®چى‰و–ت‚ھ•\ژ¦‚³‚ê‚ـ‚·پBپ@‚±‚جژ‚ة‰و–ت‚ً‰EƒNƒٹƒbƒN‚·‚é‚ئپATV‰و–تگ§Œنƒپƒjƒ…پ[پiژتگ^‚P‚Sپj‚ھ•\ژ¦‚³‚ê‚é‚ج‚إپAپuCreate ‚–‚‰‚…‚— for Outputپv‚ً‘I‘ً‚·‚é‚ئپAژتگ^‚P‚T‚ج‚و‚¤‚ة•ت‚جWindowsTV‰و–تپiOutput Viewپj‚ھٹJ‚«پAƒRپ[ƒh‚ًگiچs‚³‚¹‚ؤ‚àOutput ViewTV‰و–ت‚ح‚»‚ج‚ـ‚ـ‚جˆت’u‚ةŒإ’肳‚ê‚é‚ج‚إپA“®‰و‚ًٹm”F‚·‚é‚ج‚ة•ض—ک‚إ‚·پB
‚WƒuƒچƒbƒN–ع‚ـ‚إ‚جƒRپ[ƒh‚ًژہچs‚·‚ê‚خپA‚ك‚إ‚½‚پu‘|ڈœƒچƒ{ƒbƒgŒ^JetBotپv‚ھڈص“ث‚ً‰ٌ”ً‚µ‚ب‚ھ‚çژ©“®‘–چs‚µ‚ـ‚µ‚½پBپ@‘–چsƒXƒsپ[ƒh‚حپA•t‘®ƒ‚پ[ƒ^‚ج’èٹi‚ئژv‚ي‚ê‚é‚WV’ِ“x‚إ‚·‚ج‚إپAŒ©‚ؤ‚¢‚éŒہ‚èƒfƒtƒHƒ‹ƒg‚جƒpƒ‰ƒپپ[ƒ^‚ج‚ـ‚ـ‚إ‚àپA‘|ڈœƒچƒ{ƒbƒg‚ة“K‚µ‚½ƒXƒsپ[ƒh‚إ‚ح‚ب‚¢‚©‚ئژv‚¢‚ـ‚·پB
پ@‰ٌ”ً‚·‚ׂ«ڈلٹQ•¨“™‚ئ‚ج‹——£‚ً”»’f‚µ‚ؤ‚¢‚é—lژq‚ًژ¦‚·ƒCƒ“ƒWƒPپ[ƒ^‚àگ³ڈي‚ة‹@”\‚µ‚ؤ‚¢‚é‚و‚¤‚إپA‘–چs’†‚ح•p”ة‚ة’l‚ھڈم‰؛‚ة•د“®‚µ‚ـ‚·پBپ@ƒCƒ“ƒWƒPپ[ƒ^‚ج’l‚ھ‚OپD‚T‚ً’´‚¦‚é‚ئ‰ٌ”ًƒ‚پ[ƒh‚ة‚ب‚é‚و‚¤‚إ‚·پBپ@
پ@ڈص“ث‰ٌ”ًƒ‚پ[ƒh‚ة“ü‚ء‚½ڈَ‘ش‚ج‚إ‘–چs—ل‚ھژتگ^‚P‚Uپ`‚Q‚P‚إ‚·پB
پ@ژتگ^‚P‚U‚ھڈص“ث‰ٌ”ًƒ‚پ[ƒh‚ة“ü‚èژn‚ك‚ؤ‚¢‚éڈَ‹µ‚إپAƒCƒ“ƒWƒPپ[ƒ^‚ح•p”ة‚ةڈم‰؛‚µ‚ؤ‚¢‚ـ‚·‚ھپAژB‰eڈuٹشژ‚جƒCƒ“ƒWƒPپ[ƒ^’lپiژتگ^‚P‚Vپj‚ح‚OپD‚V‚Q‚ئ‚ب‚ء‚ؤ‚¨‚èپAڈص“ث‚ً‰ٌ”ً“®چى‚ة“ü‚éچإڈ¬’l‚OپD‚T‚ً’´‚¦‚ؤ‚¢‚ـ‚·پB
پ@“¯—l‚ةژتگ^‚P‚W‚حپAڈص“ث‰ٌ”ً‚ج‚½‚كJetBot‚ھچ¶‰ٌ‚è‚ةˆع“®‚µ‚ؤ‚¢‚éڈَ‹µ‚إ‚·‚ھپA‚ظ‚ع‰ٌ”ً‚µ‚½ڈَ‹µ‚إ‚جƒCƒ“ƒWƒPپ[ƒ^’lپiژتگ^‚P‚Xپj‚ح‚OپD‚P‚R‚ئ‚ب‚èپAٹ®‘S‚ة‰ٌ”ً‚µ‚½ڈَ‹µ‚ھژتگ^‚Q‚O‚إپAƒCƒ“ƒWƒPپ[ƒ^’lپiژتگ^‚Q‚Pپj‚ح‚OپD‚P‚P‚ئ‚ب‚ء‚ؤ‚¢‚ـ‚·پB
پ@ˆبڈم‚إژو‚è‚ ‚¦‚¸‚حپAژژچى‚جپu‘|ڈœƒچƒ{ƒbƒgŒ^JetBotپv‚ھپA’ٌ‹ں‚³‚ꂽپuٹwڈKچد‚فƒ‚ƒfƒ‹پv‚إپAگ³ڈي‚ةڈص“ث‰ٌ”ًژ©“®‘–چs‚ھڈo—ˆ‚邱‚ئ‚ًٹm”F‚µ‚ـ‚µ‚½پB
پ@ژں‚جƒXƒeƒbƒv‚حپAژ©‘O‚إپu‹³ژtƒfپ[ƒ^پv‚ًژûڈW‚µپAٹwڈK‚³‚¹‚½ƒfپ[ƒ^‚ًژg‚ء‚ؤپA“¯—l‚ةژ©“®‘–چsƒeƒXƒg‚ًژہژ{‚µ‚½‚¢‚ئژv‚¢‚ـ‚·پB
to AI No2-5 to AI No2-7
to AI No2-10
to گVƒeƒNپEƒAƒ‰ƒJƒ‹ƒg
پ@پ@پ@پ@پ@پ@پ@پ@پ@
پ@پ@پ@پ@پ@
پ@پ@پ@پ@پ@پ@پ@
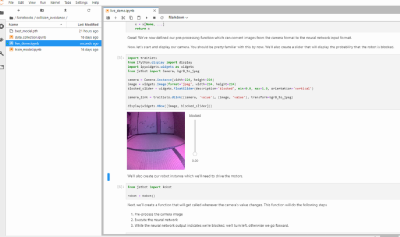
پ@پ@پ@پ@پ@پ@ پ@ ژتگ^‚P‚R ƒJƒپƒ‰‚ج“®چى‰و–ت
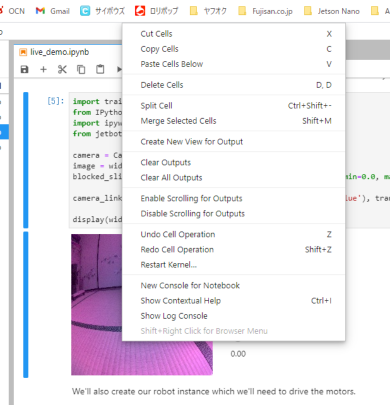
پ@پ@پ@پ@پ@پ@پ@ ژتگ^‚P‚S TV‰و–تگ§Œنƒپƒjƒ…پ[‰و–ت
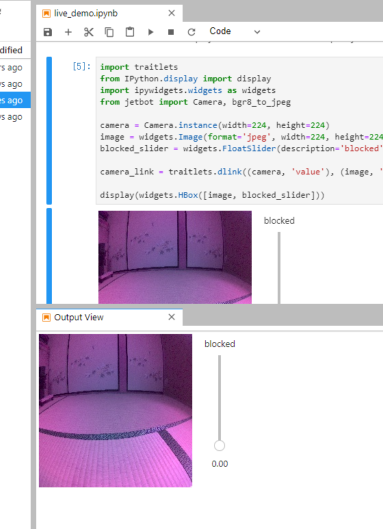
پ@پ@پ@پ@پ@ژتگ^‚P‚T •ت‚جWindowsTV‰و–تپiOutput Viewپj
پ@پ@پ@پ@پ@ژتگ^‚P‚Uپ@ڈص“ث‰ٌ”ًƒ‚پ[ƒh‚ة“ü‚èژn‚ك‚ؤ‚¢‚éڈَ‹µ
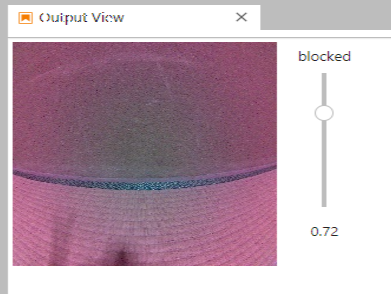
پ@پ@پ@ژتگ^‚P‚Vپ@پ@پuژتگ^‚P‚Uپv‚جژB‰eڈuٹشژ‚جƒCƒ“ƒWƒPپ[ƒ^’l
پ@پ@پ@پ@پ@پ@پ@پ@پ@پ@ژتگ^‚P‚Wپ@‚ظ‚ع‰ٌ”ً‚µ‚½ڈَ‹µ
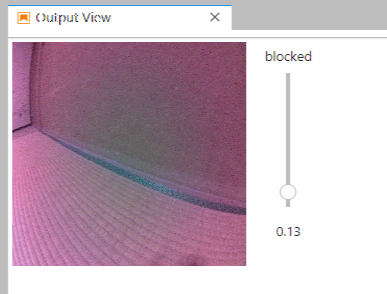
پ@پ@پ@پ@ژتگ^‚P‚Xپ@پ@پuژتگ^‚P‚Wپv‚جژB‰eڈuٹشژ‚جƒCƒ“ƒWƒPپ[ƒ^’l
پ@پ@پ@پ@پ@پ@پ@پ@ژتگ^‚Q‚Oپ@پ@ٹ®‘S‚ة‰ٌ”ً‚µ‚½ڈَ‹µ
پ@پ@پ@ژتگ^‚Q‚Pپ@پ@پuژتگ^‚Q‚Oپv‚جژB‰eڈuٹشژ‚جƒCƒ“ƒWƒPپ[ƒ^’l
پ@پ@پ@پ@پ@پ@پ@پ@پ@
پƒپ@‚s‚q‚d‚w‚S‚T‚Oپ@‚r‚o‚n‚q‚sپ@پ„
پ@‚r‚c‚w‚ة‘±‚«’ؤ—ژپB
پ@ˆب‰؛“¯•¶پB

‚`‚hپ@‚m‚ڈ2-6
| JetBot‚جگ»چى‚»‚ج‚Uپ@ڈص“ث‰ٌ”ً‘–چsƒeƒXƒg‚P |
|---|
‚Q‚O‚Q‚P”N‚P‚OŒژ‚P‚T“ْ |
 ژتگ^‚Pپ@‚QŒn“‚جƒٹƒ|ƒoƒbƒeƒٹٹضکA 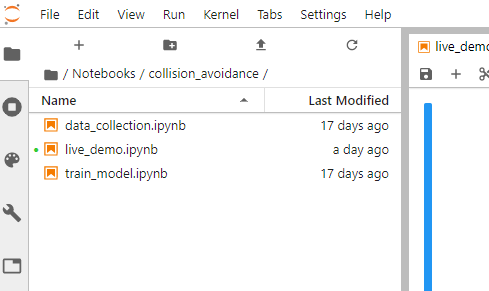 پ@ژتگ^‚Qپ@پubest_model.pthپv‚ھ–³‚¢ڈَ‹µ 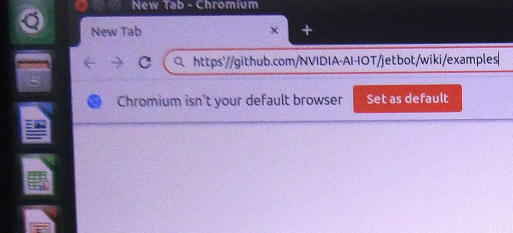 ژتگ^‚Rپ@پubest_model.pthپv‚جƒ_ƒEƒ“ƒچپ[ƒhگوExamplesƒTƒCƒg‚جURL 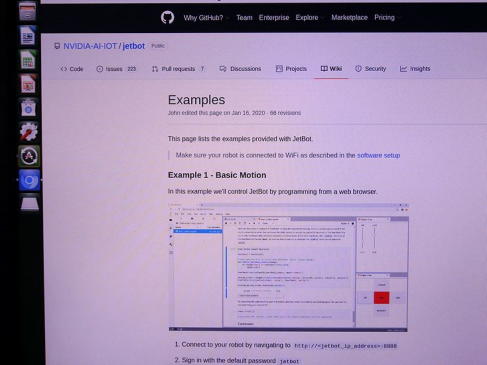 ژتگ^‚Sپ@Example‚“ƒTƒCƒg‚ج‰و–ت 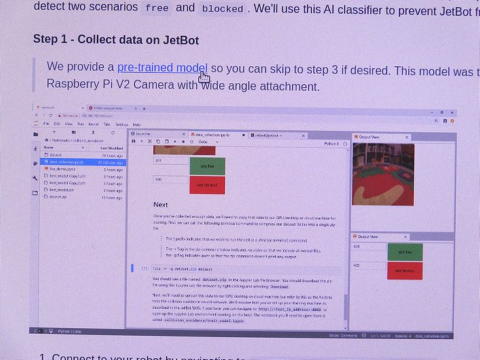 ژتگ^‚Tپ@پubest_model.pthپv‚جƒ_ƒEƒ“ƒچپ[ƒhŒ³  ژتگ^‚Uپ@پubest_model.pthپv‚جƒ_ƒEƒ“ƒچپ[ƒh‚ج‰و–ت  ژتگ^‚Vپ@پubest_model.pthپv‚جƒ_ƒEƒ“ƒچپ[ƒhƒtƒHƒ‹ƒ_پ[‚ج‰و–ت 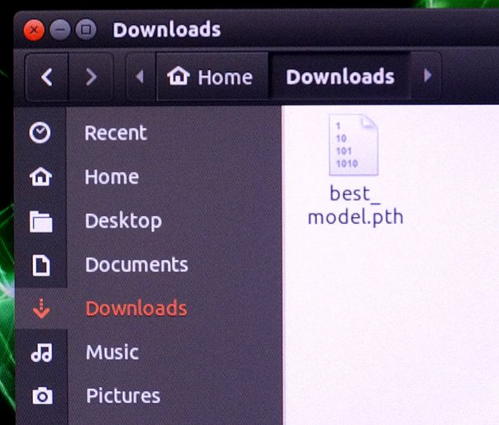 ژتگ^‚Wپ@پubest_model.pthپv‚جƒ_ƒEƒ“ƒچپ[ƒhٹm”F‰و–ت 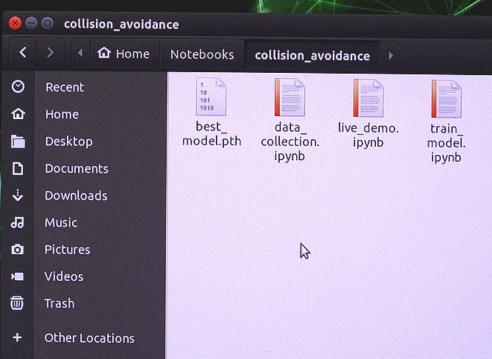 ژتگ^‚Xپ@پubest_model.pthپv‚جƒRƒsپ[ٹ®—¹ٹm”F‚ج‰و–ت  ژتگ^‚P‚Oپ@JetBot‹N“® 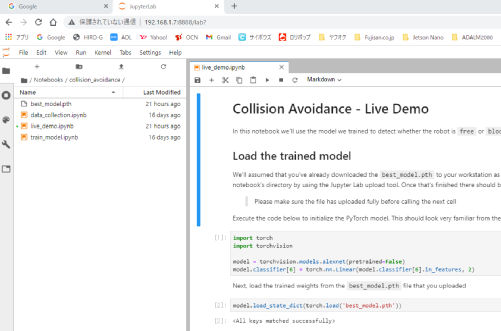 ژتگ^‚P‚Pپ@ƒzƒXƒgPCڈم‚جCollision_Avoidance‚ج‰و–ت 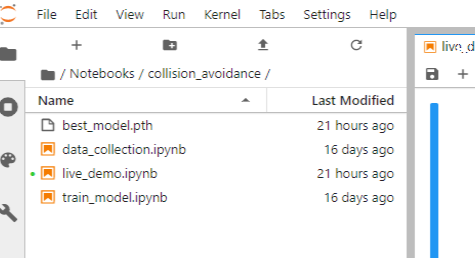 ژتگ^‚P‚Qپ@پubest_model.pthپv‚ھ’ا‰ء‚³‚ꂽ‰و–ت |