趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< JetBotの製作その2 ソフトウエア・セットアップ >
前回でケースへ収めることができましたので、2本の無指向性アンテナを取付(写真1、写真2)、JetBot用のセットアップ用のソフトはPCを使って、NVIDIA-AI-IOT/jetbotのSoftware Setupからjetbot_image_v0p4p0.zipをダウンロードしSDカードへフラッシュしたものをJetson Nano B01にセットしました。 この一連の作業は、OSのインストールの作業と全く同じです。
モータ制御基板 DC MOTOR + STEPPER FEATHERWING AとIPアドレス確認用のPiOLEDは、何れもマルツから購入しました。 取りあえずは、システムのセットアップから始めますので、PiOLEDのみをJetson nano B01のJ41ヘッダ(40pin)の所定の位置(1pin〜6pin)へ差込みました。(写真3)
ディスプレイ、キーボード、マウスを接続し、特に配線作業はしていないので、電源スイッチを入れてセットアップを開始。 電源スイッチを入れると、スイッチが写真4のように良い感じに光り、ファンが回りました。
IDとパスワードはjetbotを入力します。 しばらくするとPiOLEDにIPアドレスが表示され(写真5)、ディスクトップの画面(写真6)が表示されました。 表示画面の内容は、2GB版とは少し違った環境ですが、基本は同じようなものかと。
写真7は、ケースの上部から見た全体の状況です。
ディスクトップのGUIを使用してWiFiネットワークに接続できるように
設定(写真8)し、別のノートPCで接続できることを確認(写真9)しました。
因みにノートPCのURL設定は次の通りで、<IPアドレス>は、
PiOLEDに表示されたIPアドレスを入力します。
http://<IPアドレス>:8888
以上で、取りあえずリモートで設定、制御ができることが確認できましたが、モータのドライバー基板の取付をどうするかということですが、JetBotを試作する台車との兼ね合いがありますので、そろそろ前々から調査・検討中の台車をどうするかを決めたいと思います。
to AI No2-1 to AI No2-3
to 新テク・アラカルト
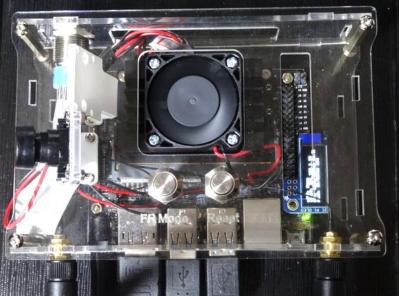
写真7 ケース上部からの見た全体の状況
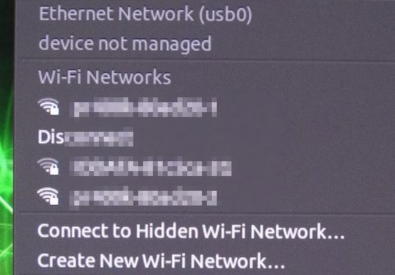
写真8 WiFiネットワーク接続の設定
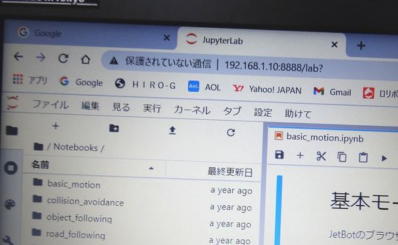
写真9 ノートPCで接続を確認
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

AI No2-2
| JetBotの製作その2 ソフトウエア・セットアップ |
|---|
2021年6月8日 |
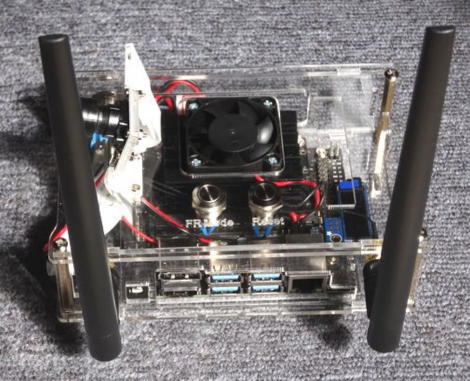 写真1 無指向性アンテナ2本セット状態ケース背面 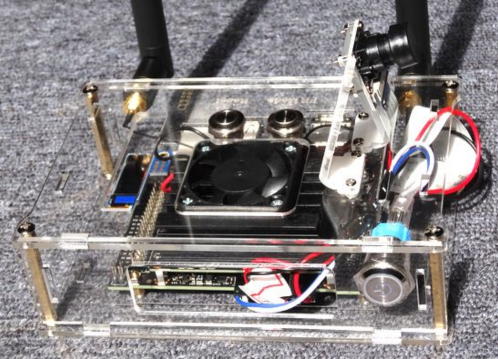 写真2 無指向性アンテナ2本セット状態ケース正面 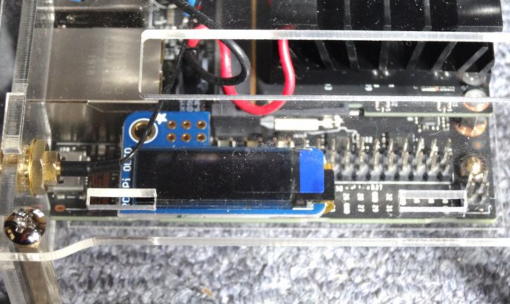 写真3 PiOLEDのセット状態 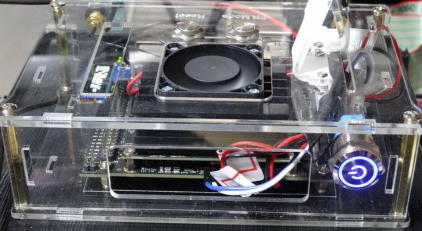 写真4 電源スイッチONの状態 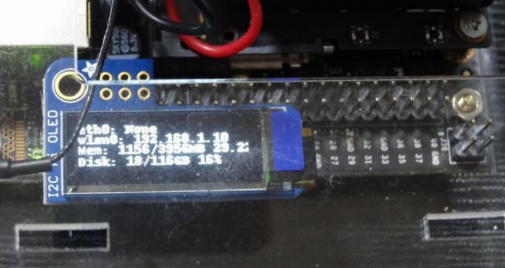 写真5 PiOLEDにIPアドレスが表示されている状態  写真6 ディスクトップの画面 |