趣味工房 HIRO-Gのヘッダー
趣味工房 HIRO-G
< JetBotの製作その3 台車の準備と制御部の改良 >
台車としては、いろいろ調査・検討しました結果、ヤフオクでロボットクリーナの中古品がいろいろ出品されているのを見て、面白そうなので大きさが手頃で新品同様のデットストック品を¥3000程で入手しました。 メーカーは「(株)環境技研」、販売元はツカモトエイム(株)の製品で、型式は「AIM-RC02」で、8年ぐらい前の製品と思います。(写真1)
直径が25cm程度で「Jetson Nano B01」をケースに入れた状態でも十分載せられる大きさで、車輪も写真2のように大きいいので使えそうです。 因みに掃除機用のブラシは取り外しています。
写真3は上蓋をスライドして外してバッテリを取り外した状態です。 バッテリはニッケル水素電池(写真4)、14.4V、800mAhで、充電してロボットクリーナを動かしましたが、正常に動きました。 掃除機能は、3種類の走行パターンをランダムに繰り返し掃除するという単純のものです。
写真5はケース上部と下部を分割した状態で、制御基板等が収められています。 今回は台車として使いますので、先ずは走行用の車輪とモータがあれば良いので、その他の制御基板関連と掃除に関与する車輪とモータ関係以外は全て取り外しました。(写真6)
台車として使うだけでも安上りで入手できましたが、掃除機能等を元に戻せば、AI機能を付加したロボットクリーナに変身できるかも知れませんので、面白そうです。
モータ駆動に関する制御基板は、スペース的に「Jetson Nano B01」収納ケース内部に収めることはできないので、拡張用のインターフェース基盤としては、ヘッダピンがコンパチのRasberr PiZero用の「グローブベースHAT」(写真7)を使うこととし、千石電商から購入しました。 4ピンのケーブルも同時に購入しました。
写真8は「Jetson Nano B01」のJ41ヘッダへ取付けた状態の上部写真です。 写真9は側面から映した写真ですが、「Jetson Nano B01」のJ38ヘッダピンが当たらないようにスペーサと40ピンのピッヘッダ ソケットを使って取付けました。
PiOLEDは写真10のように元の所定の位置に取付、ケースの上蓋を取付けた状態で、作動試験を行った結果は写真11のように正常に機能しました。
試験用の台車が決まり、モータのドライバ基板の外付けの準備が終わりましたので、今後はモータのドライバ基板の取付と駆動方法の検討を行います。
to AI No2-2 to AI No2-4
to 新テク・アラカルト
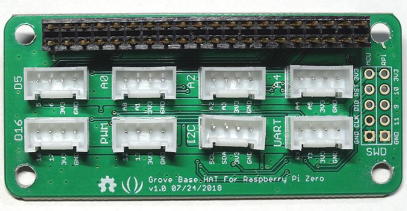
写真7 Rasberr Pi Zero用「グローブベースHAT」
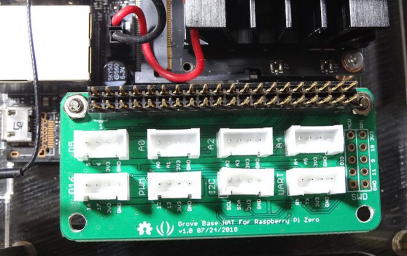
写真8 「グローブベースHAT」を取付けた状態(上部)
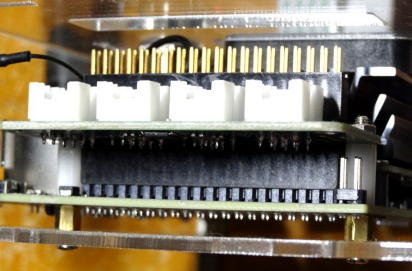
写真9 「グローブベースHAT」を取付けた状態(側面)
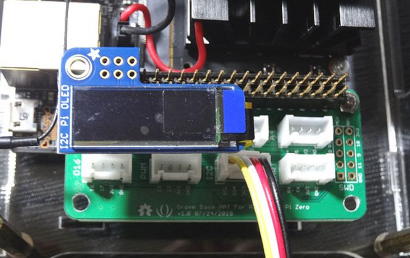
写真10 PiOLEDを取付けた状態
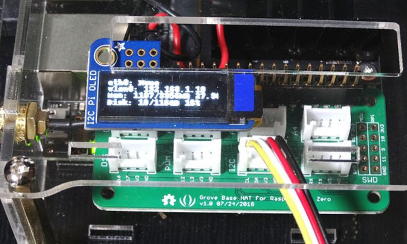
写真11 作動試験
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

AI No2-3
| JetBotの製作その3 台車の準備と制御部の改良 |
|---|
2021年6月24日 |
 写真1 「AIM-RC02」の上部  写真2 「AIM-RC02」の裏部  写真3 「AIM-RC02」の上蓋を外した状態 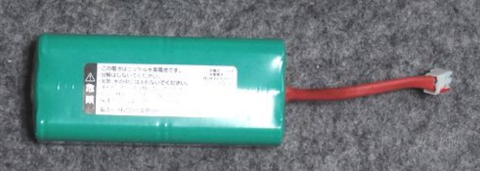 写真4 ニッケル水素電池(14.4V、800mAh) 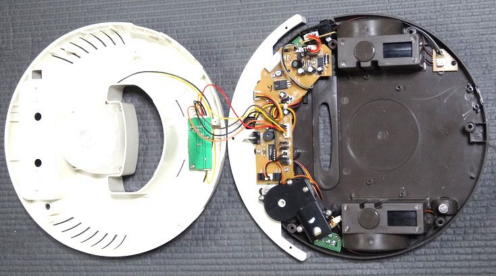 写真5 本体カバーケースを上部と下部に分割した状態 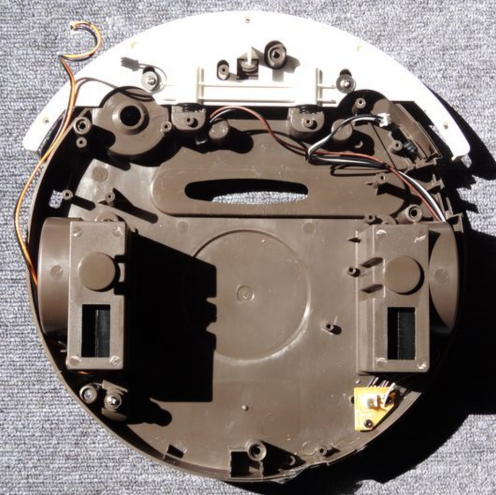 写真6 走行用車輪とモータ以外を取り外した状態 |