趣味工房 HIRO−Gのヘッダー
趣味工房 HIRO-G
< JetBotの製作その4 拡張基板製作とテスト >
カメラの取付が上下反対となっている事に気付きましたが、カメラのFFCジャンパーケーブルのコネクターが上部となるため、ケーブルの取り回しが楽になるようカメラの取付位置を写真1のように前方へ移動させました。
モータドライブ基板は本体ケースの外部へ取付けますので、PiOLEDの基板とデジタル電圧計も一つの基板に載せて、いろいろテスト出来るように拡張基板を製作することとしました。
写真2、3はPiOLEDを拡張基板へ移しテストした結果、正常に表示された状態と、モータドライブ基板を仮付した状態の写真です。 拡張基板は、グローブベースHATのI2Cポートから4ピンケーブルで接続します。 因みに接続される信号線は、SDA、SCL、3.3V及びGNDです。
写真4のモータドライブ基板、
DC MOTOR + STEPPER FEATHERWING A【2927】はマルツから、デジタル電圧計はアマゾンから購入しました。 尚、デジタル電圧計はカバーを外した状態で使用しています。
写真5は拡張基板の完成した状態の写真で、モータ用の電源入力端子、スイッチ及び車輪駆動用の左右モータ用の出力コネクタを追加しています。 本体ケースに拡張基板を取付けた状態が写真6です。
電源として手持ちのリポバッテリ(4セル、14.8V、1500mAh)を使いたいと思い、ロボットクリーナを分解した際に車輪の駆動用モータの仕様を調べてみましたが、バンダイ製のJXD RK-370(8V、8000rpm)系のようですので、取りあえずは本体と同じ5Vでテストしてみたいと思います。
5Vへ電圧を落とすためにDC-DCコンバータを使用しますが、本体が最大で3Aほど必要なことから、4〜5Aが取れるものを4種類ほどアマゾンから購入しました。
今回は、HiLetgo XL4015 (5A、入力4〜38V、出力1.25V〜36V)、を使い、入力にはバッテリ用のコネクタと出力には本体用とモータドライブ用のコネクタをハンダ付けしたものが写真7です。
先ずはモータ用電源スイッチをOFFの状態で、、写真8のようにモータ用の電源コネクタをモータ電源入力端子へ接続して、入力コネクタへリポバッテリを接続し、出力電圧調整用VR(写真9)で出力電圧を5.1V程度に調整しました。
出力電圧の調整が完了した後、写真10、11のように本体用のコネクタを接続し、電源スイッチを押して「Jetson Nano B01」を起動させ、PiOLEDの作動を確認。 最後にモータ用電源のスイッチをONにし、写真12のようにモータドライブ基板の緑のLEDが点灯するのを確認しました。
以上で、「Jetson Nano B01」と拡張基板関連のハード面のテスト環境は一応完成ということで、今後は、いよいよJetBotの試験走行作業に入りたいと思います。
to AI No2-3 to AI No2-5
to 新テク・アラカルト
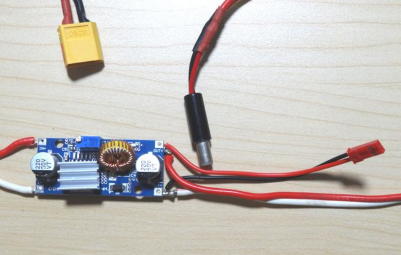
写真7 電源用のDC-DCコンバータ
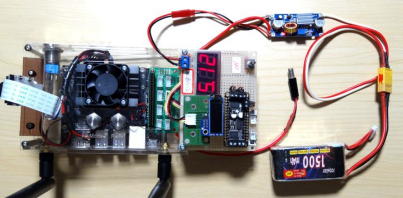
写真8 DC-DCコンバータの電圧調整

写真9 DC-DCコンバータの出力調整用VR

写真10 本体への電源供給テスト
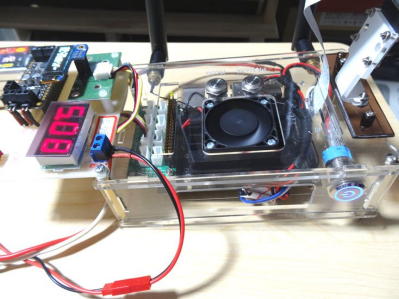
写真11 電源スイッチONの作動状況

写真12 拡張基板全体の作動状況
< TREX450 SPORT >
SDXに続き墜落。
以下同文。

AI No2-4
| JetBotの製作その4 拡張基板製作とテスト |
|---|
2021年7月10日 |
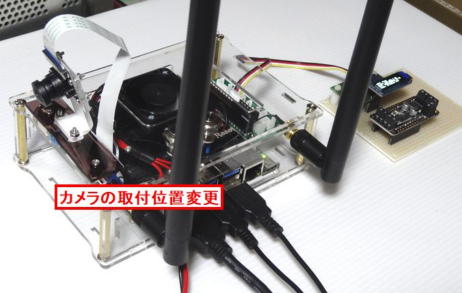 写真1 カメラの取付位置の変更 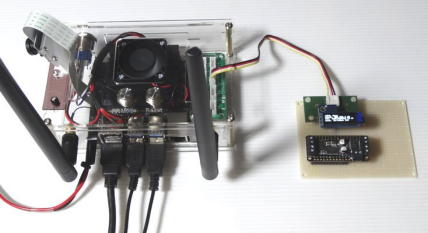 写真2 製作中の拡張基板のテスト 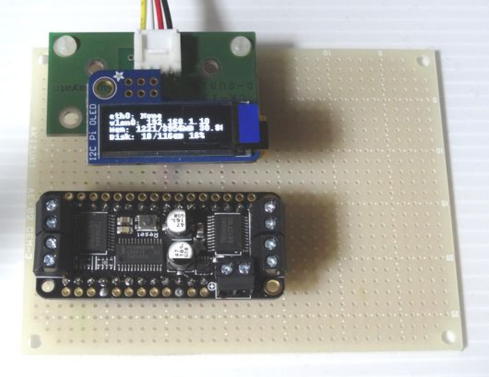 写真3 製作中の拡張基板 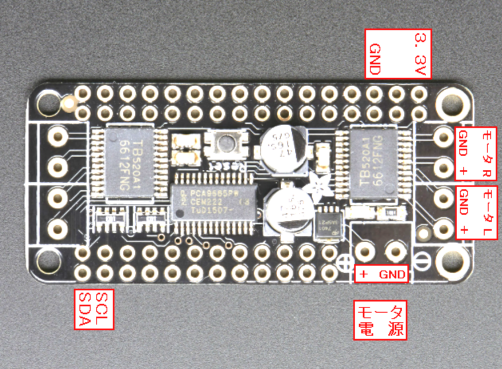 写真4 DC MOTOR + STEPPER FEATHERWING A【2927】 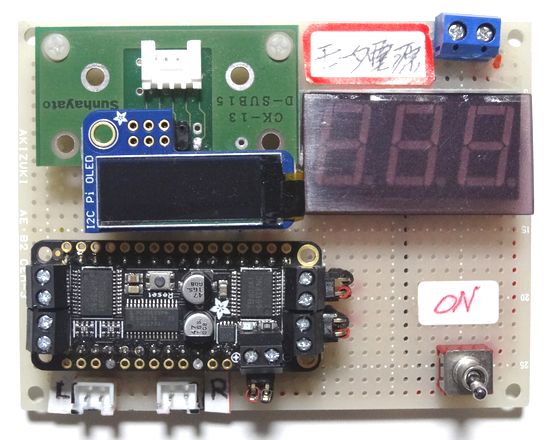 写真5 完成した拡張基板 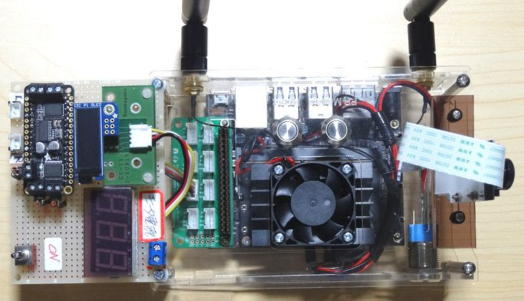 写真6 拡張基板を取付た状態 |